
点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:3D视觉工坊
添加小助理:cv3d001,备注:方向+学校/公司+昵称,拉你入群。文末附3D视觉行业细分群。
扫描下方二维码,加入「3D视觉从入门到精通」知识星球,星球内凝聚了众多3D视觉实战问题,以及各个模块的学习资料:近20门秘制视频课程、最新顶会论文、计算机视觉书籍、优质3D视觉算法源码等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

标题:RANSAC Back to SOTA: A Two-stage Consensus Filtering for Real-time 3D Registration
作者:Pengcheng Shi, Shaocheng Yan, Yilin Xiao, Xinyi Liu, Yongjun Zhang, Jiayuan Li
机构:Wuhan University、Huawei Technologies Co
原文链接:https://arxiv.org/abs/2410.15682
代码链接:https://github.com/ShiPC-AI/TCF
基于对应关系的点云配准在机器人和计算机视觉中起着关键作用。然而,传感器噪声、物体遮挡和描述符限制等挑战不可避免地会导致大量异常值。RANSAC系列是最受欢迎的离群点消除解决方案。然而,必要的迭代随着异常值比率呈指数级上升,使其远不如现有的方法(SC2PCR [1],MAC [2]等)。)在准确度或速度上。因此,我们提出了两阶段一致过滤(TCF),将RANSAC提升到最先进的(SOTA)速度和准确性。首先,单点RANSAC获得基于长度一致性的共识集。随后,两点RANSAC通过角度一致性优化集合。然后,三点RANSAC计算一个粗略的姿态,并根据变换后的对应距离删除异常值。借鉴一点和两点RANSAC的优化,三点RANSAC只需要几次迭代。最后,应用迭代加权最小二乘(IRLS)来产生最佳姿态。在大规模KITTI和ETH数据集上的实验表明,与MAC相比,我们的方法在保持注册准确率和召回率的同时,实现了三个数量级的加速。
点云配准(PCR)旨在估计一个六自由度(6-DOF)姿态以对齐点云,这对于三维重建、机器人导航和航空摄影测量至关重要。迭代最近点(ICP)开创了局部配准流程,通过迭代搜索对应点并最小化其距离。然而,在视角发生显著变化时,它往往会收敛到错误的局部最优解。为了克服这一难题,研究人员从特征对应中推导出粗略姿态[,这被称为基于对应的PCR。但是,传感器噪声、物体遮挡和描述符限制不可避免地会导致异常值,为配准带来巨大挑战。
随机采样一致性(RANSAC)是处理含异常值对应的最流行解决方案。它遵循生成与选择策略,通过迭代采样对应来生成和验证假设。然而,所需的迭代次数随着异常值比例的增加而急剧上升,这使得其准确性和效率远不及现有方法。推荐课程:聊一聊经典三维点云方法,包括:点云拼接、聚类、表面重建、QT+VTK等。
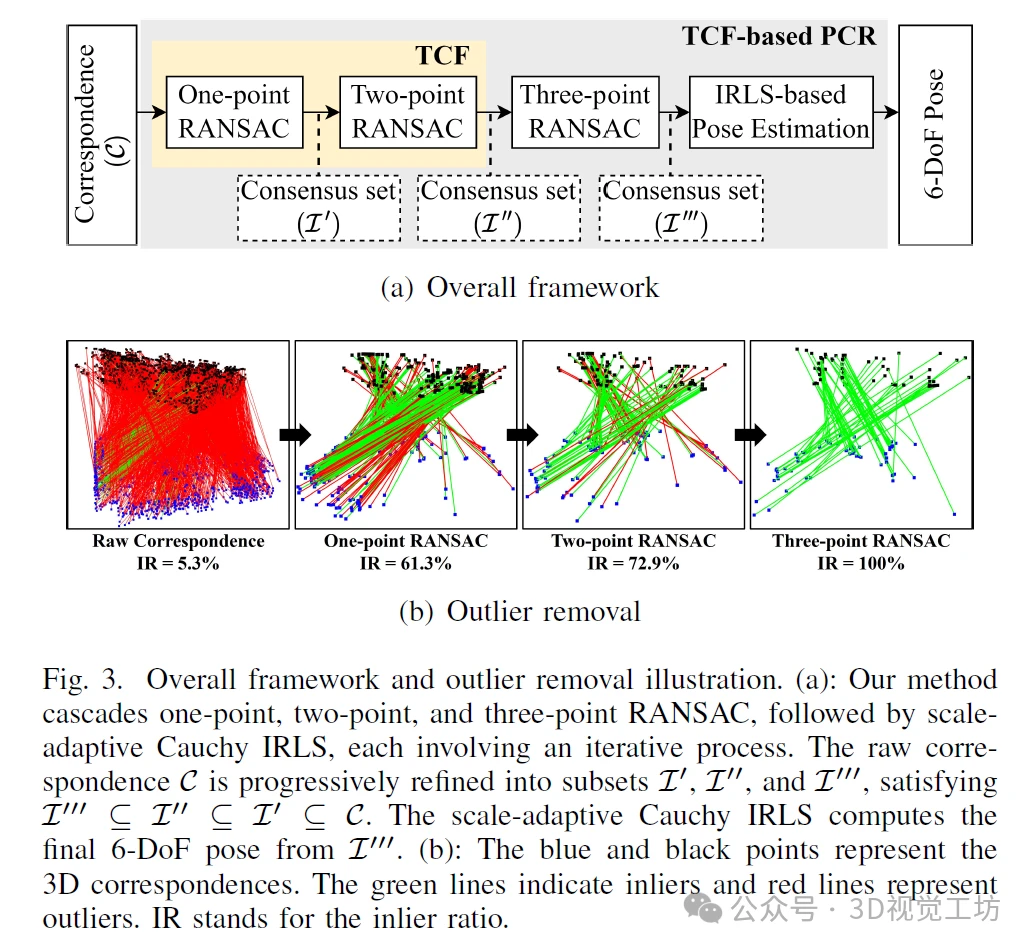
因此,我们提出了一种两阶段共识过滤(TCF),在三点RANSAC之前加入单点RANSAC和两点RANSAC步骤,以确保准确性并显著提升效率。它首先通过单点RANSAC利用长度约束去除对应异常值。随后,两点RANSAC评估角度一致性以获得更可靠的共识。这种设计通过降低采样维度显著减少了迭代次数,同时也降低了异常值比例。因此,三点RANSAC仅需少量迭代,即可提升配准性能。接着,三点RANSAC计算粗略姿态,并根据变换后的对应距离去除异常值。最后,应用尺度自适应柯西迭代重加权最小二乘法(IRLS)计算最优姿态。
如图1所示,我们的方法展示了最优性能,并实现了高达三个数量级的加速。

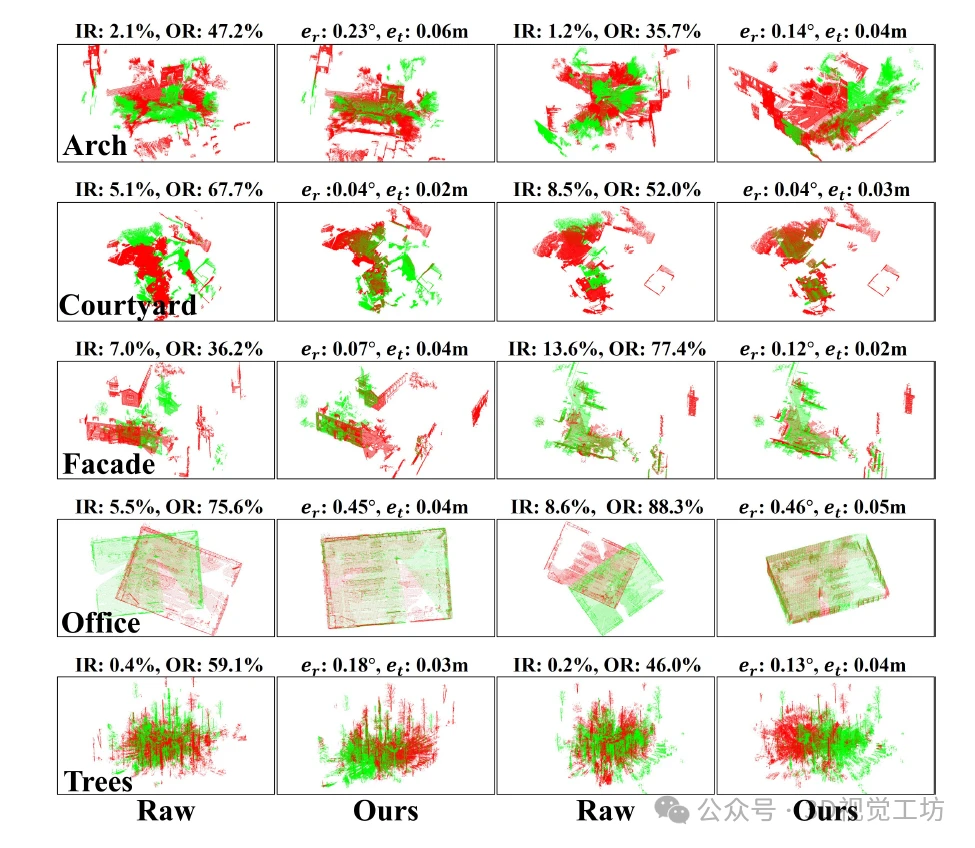
ETH数据集上配准结果的可视化。红色和绿色分别表示源点云和目标点云。IR表示内点比率,OR表示重叠比率。er表示旋转误差,et表示平移误差。
主要贡献如下:
• 我们设计了一种两阶段过滤方法,能够迅速消除大部分对应异常值,从而使RANSAC达到最优水平。
• 基于我们的过滤方法,我们构建了一个完整的PCR流程。在大型室外数据集上,它显著提高了效率,同时确保了准确性。
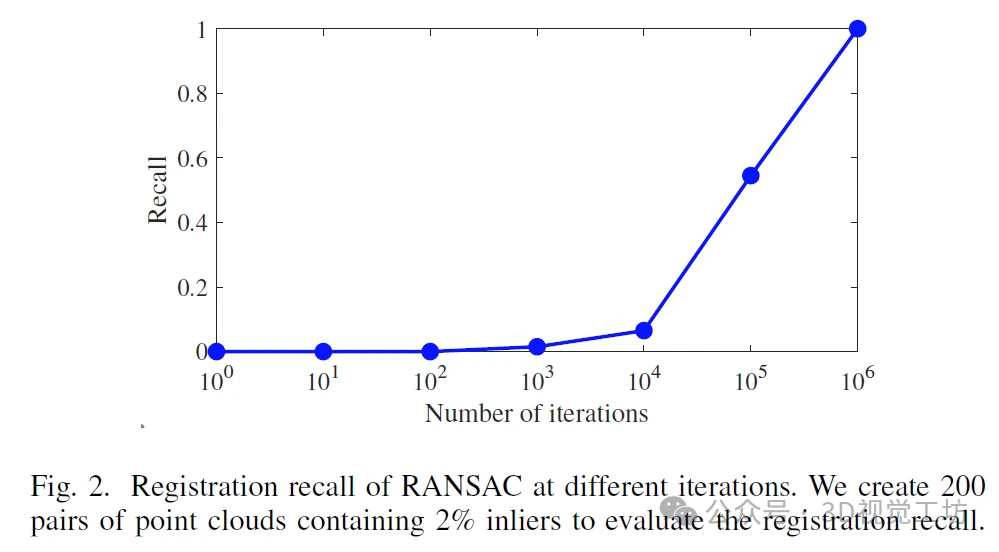
RANSAC所需的最小迭代次数Nransac计算如下:
其中,ϑ是异常值比例,s表示样本大小,⌈·⌉是向上取整函数,λ表示至少包含一个完美最小子集的概率,默认设置为0.99。如图2所示,我们评估了200对点云在不同迭代次数下的配准召回率。随着迭代次数从10³增加到10⁵和10⁶,配准召回率从2%提高到5%,并最终达到100%。
然而,三维对应中的异常值比例非常高,这导致基于公式(1)的RANSAC迭代次数大幅增加。在实际应用中,进行过多迭代是不切实际的,因此需要设置限制以平衡效率和准确性。重新审视公式(1)发现,除了异常值比例外,样本大小也会影响迭代次数。具体而言,减小样本大小也可以指数级地减少所需迭代次数。因此,我们提出了包含单点RANSAC和两点RANSAC的两阶段共识过滤(TCF)。单点RANSAC应用长度约束来消除异常值,随后是两点RANSAC,通过角度一致性增强共识可靠性。这种方法比三点RANSAC所需的样本更少,并降低了异常值比例。然后,我们将精炼后的对应输入到三点RANSAC中。由于异常值比例显著降低,所需迭代次数减少,从而提升了性能。
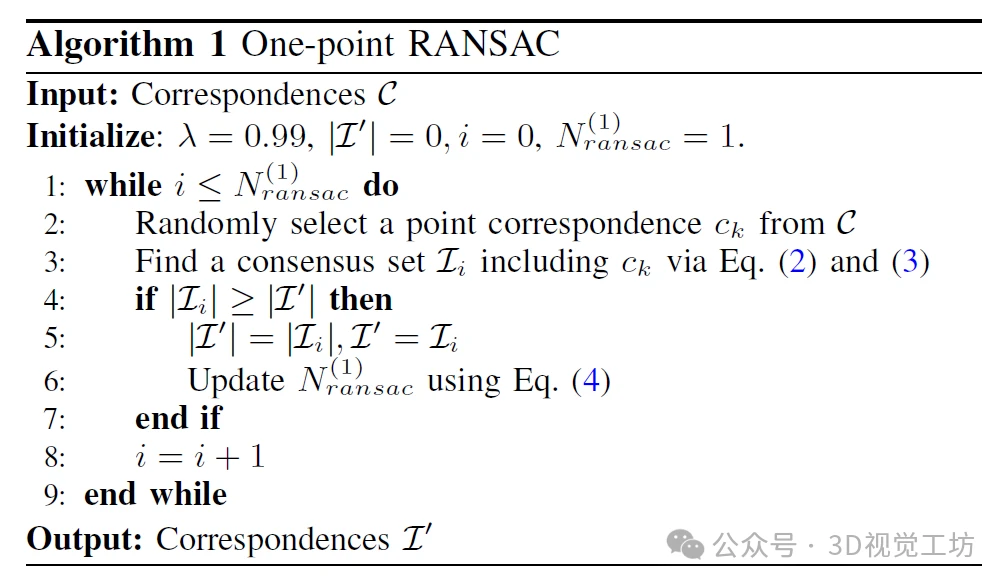
如算法1所述,单点RANSAC算法以初始对应关系C为输入,基于长度一致性输出一个共识集I'。
虽然共识集满足了长度要求,但像黄色对应关系这样的离群值仍然存在。因此,我们提出了一种两点RANSAC算法来优化共识集。如算法2所述,两点RANSAC算法以单点RANSAC的结果I'为输入,并基于角度一致性排除离群值。
召回率和准确率。表III总结了KITTI数据集上的配准结果。图8描绘了我们的配准结果。由于点云之间存在较大偏移(约17米),所有方法均出现性能下降。序列01是一个高速场景,以显著畸变和特征退化为特征,导致内点率较低,仅为2.4%。尽管如此,我们的方法仍实现了最高的召回率(65%)。在所有五个序列中,我们的方法获得了第二高的平移精度:0.25米(01),0.34米(02),0.25米(03),0.21米(06)和0.25米(09)。我们的旋转精度略微落后于SC2PCR和MAC,但最大偏差保持在0.18°以内。这些结果强调了我们的方法在高速公路等具有挑战性的环境中表现出色,具有较高的配准召回率。
运行效率。我们的方法仍然表现出卓越的效率。在序列01中,我们的方法分别比RANSAC10K、RANSAC50K、TEASER、SC2PCR、MAC和PCR-99快28倍、141倍、2倍、23倍、451倍和155倍。同样,在序列06中,我们的速度分别比RANSAC10K、RANSAC50K、TEASER、SC2PCR、MAC和PCR-99快42倍、205倍、3倍、35倍、465倍、2132倍和194倍。在序列09中,我们的方法执行时间为54毫秒,显著优于RANSAC10K、RANSAC50K、TEASER、SC2PCR、MAC和PCR-99,分别比它们快46倍、221倍、2倍、28倍、580倍和68倍。我们的方法在显著提升速度的同时,提供了与基线方法相当或更优的性能。这些结果证明了我们在处理低重叠度数据时的有效性和效率。此外,这些结果再次证实了我们的方法将RANSAC系列提升到了最优水平(SOTA)。
如表IV所示,我们将共识集输入到其他方法中,以评估配准性能。表中的总运行时间包括我们的方法和基线方法的运行时间。我们的方法将树的对应点从8842减少到60,将内点率从1.2%提高到98%。所有管道均实现了100%的召回率和稳定的配准,偏差限制在0.27°和0.05米以内。TEASER和PCR-99分别将召回率提高了30%和50%。TEASER、SC2PCR、MAC和PCR-99分别比其原始方法快了332毫秒、9秒、330秒和10秒。在序列01中,对应点从3343减少到121,而内点率从2.4%跃升至48%。TEASER、SC2PCR和MAC的召回率分别提高了12%、15%和10%。TEASER、SC2PCR、MAC和PCR-99分别加快了约70毫秒、2秒、30秒和12秒。这些结果表明,将我们的方法与其他方法相结合,可以有效提升配准性能,并在速度上实现质的飞跃。
我们提出了一种基于对应点的两阶段共识过滤方法。我们的方法使RANSAC系列恢复了最优水平(SOTA)的性能。通过结合长度一致性和角度一致性,我们有效地消除了大部分外点,从而减少了三点RANSAC所需的迭代次数。我们将三个RASNAC模块和迭代加权最小二乘法结合成一个完整的配准管道,该管道在不牺牲准确性的前提下加速了配准过程。实验结果表明,该方法在实现三个数量级的速度提升的同时,保持了较高的配准质量。此外,将我们的方法与现有方法相结合,可以显著提高效率和召回率。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~
本文仅做学术分享,如有侵权,请联系删文。
目前我们已经建立了3D视觉方向多个社群,包括2D计算机视觉、最前沿、工业3D视觉、SLAM、自动驾驶、三维重建、无人机等方向,细分群包括:
工业3D视觉:相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
SLAM:视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
自动驾驶:深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
三维重建:3DGS、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
无人机:四旋翼建模、无人机飞控等
2D计算机视觉:图像分类/分割、目标/检测、医学影像、GAN、OCR、2D缺陷检测、遥感测绘、超分辨率、人脸检测、行为识别、模型量化剪枝、迁移学习、人体姿态估计等
最前沿:具身智能、大模型、Mamba、扩散模型等
除了这些,还有求职、硬件选型、视觉产品落地、产品、行业新闻等交流群
添加小助理: cv3d001,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。
3D视觉工坊知识星球
「3D视觉从入门到精通」知识星球,已沉淀6年,星球内资料包括:秘制视频课程近20门(包括结构光三维重建、相机标定、SLAM、深度估计、3D目标检测、3DGS顶会带读课程、三维点云等)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉优质源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。欢迎加入3D视觉从入门到精通知识星球,一起学习进步。
3D视觉工坊官网:www.3dcver.com
具身智能、3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D目标检测、深度估计、多传感器标定、规划与控制、无人机仿真、C++、三维视觉python、dToF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、多模态融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪等。
3D视觉模组选型:www.3dcver.com
— 完 —
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
3D视觉科技前沿进展日日相见 ~
到此这篇traceparts零件库(traceparts零件库激活成功教程版)的文章就介绍到这了,更多相关内容请继续浏览下面的相关推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/rfx/47286.html