

这还是我第一次使用现实的激光雷达,之前都是虚拟的ROS环境
这次购买了思岚家的C1雷达,解决问题做一个记录,希望能给大家一点帮助
话不多说,直接开始正题~
进入到src工作空间
创建好工作目录后我们开始从git上下载一个思岚官方的测试库
没有安装git的可以先安装一下
安装完毕后访问这个git下载
GitHub - Slamtec/rplidar_ros
这个是思岚的官方测试库
通过git clone下载
然后再下载laser_scan_tools
下载完毕后就可以看到src文件夹当中的文件了

回到catkin的根目录,之前没编译过所以你不会看到build和devel文件夹,截图是为了告诉回到哪个
文件夹
回到这里后右键打开终端
首先我们需要下载一下
这样编译的时候就不会报错了
使用catkin_make编译一下
编译完毕后就可以看到上图的样子了
然后接着添加一下source
为了让source永久生效,把它写入.bashrc文件中
源码安装rplidar-ros驱动
源码安装hector_slam库
首先测试一下你的雷达工作了没有
查看你的雷达串口号
看到雷达是连接到了该串口
给这个串口赋权限
然后运行下载思岚的测试库
这时候就可以看到打开了rviz并且看到了点云
我们通过Vscode(或者你自己的编辑器)打开catkin_ws下的src当中下载的scan_tools,找到laser_scan_matcher当中的demo,右键打开文件夹

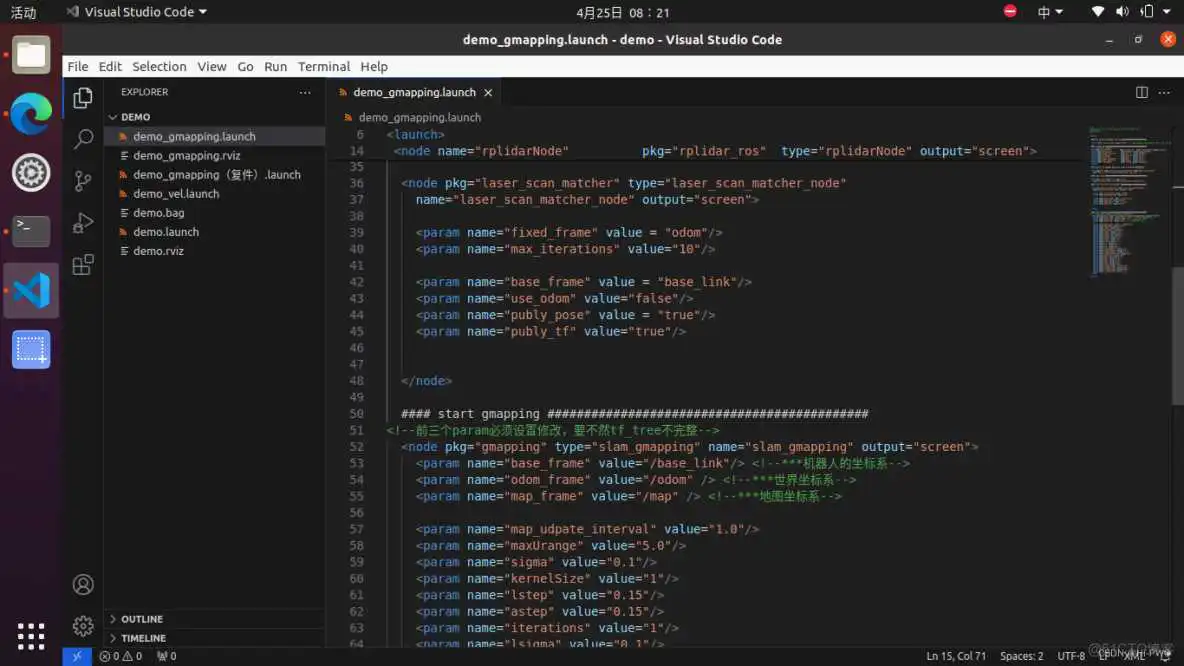
找到demo_gmapping.launch,修改为下面的程序
最后回到catkin_ws目录编译一遍,再使用打开launch就可以了
到此这篇traceparts零件库(traceparts零件库有电气吗)的文章就介绍到这了,更多相关内容请继续浏览下面的相关推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/rfx/21462.html