
【单片机毕业设计项目分享系列】
这里是DD学长,单片机毕业设计及享100例系列的第一篇,目的是分享高质量的毕设作品给大家。
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的单片机项目缺少创新和亮点,往往达不到毕业答辩的要求,为此学长准备了相对容易且工作量达标,并包含创新点的项目分享给大家。
刺 整理的题目标准:
- 相对容易
- 工作量达标
- 题目新颖,含创新点
刺 项目分享:见文末!
主要功能
红外热图像测温系统主要由Arduino主控制器、红外传感器模块、温度检测模块、TFTLCD显示屏模块、蜂鸣器模块等组成,该系统的硬件设计框图如图1.1所示。系统采用AMG8833红外热成像模块采集8*8的温度矩阵,通过I2C通讯传回MCU,MCU经过插值计算、RGB编码等处理后再将热像图显示在TFTLCD屏上。
磊项目综合综合评分(每项满分5分)
- 难度系数:3分
- 工作量:4分
- 创新点:5分

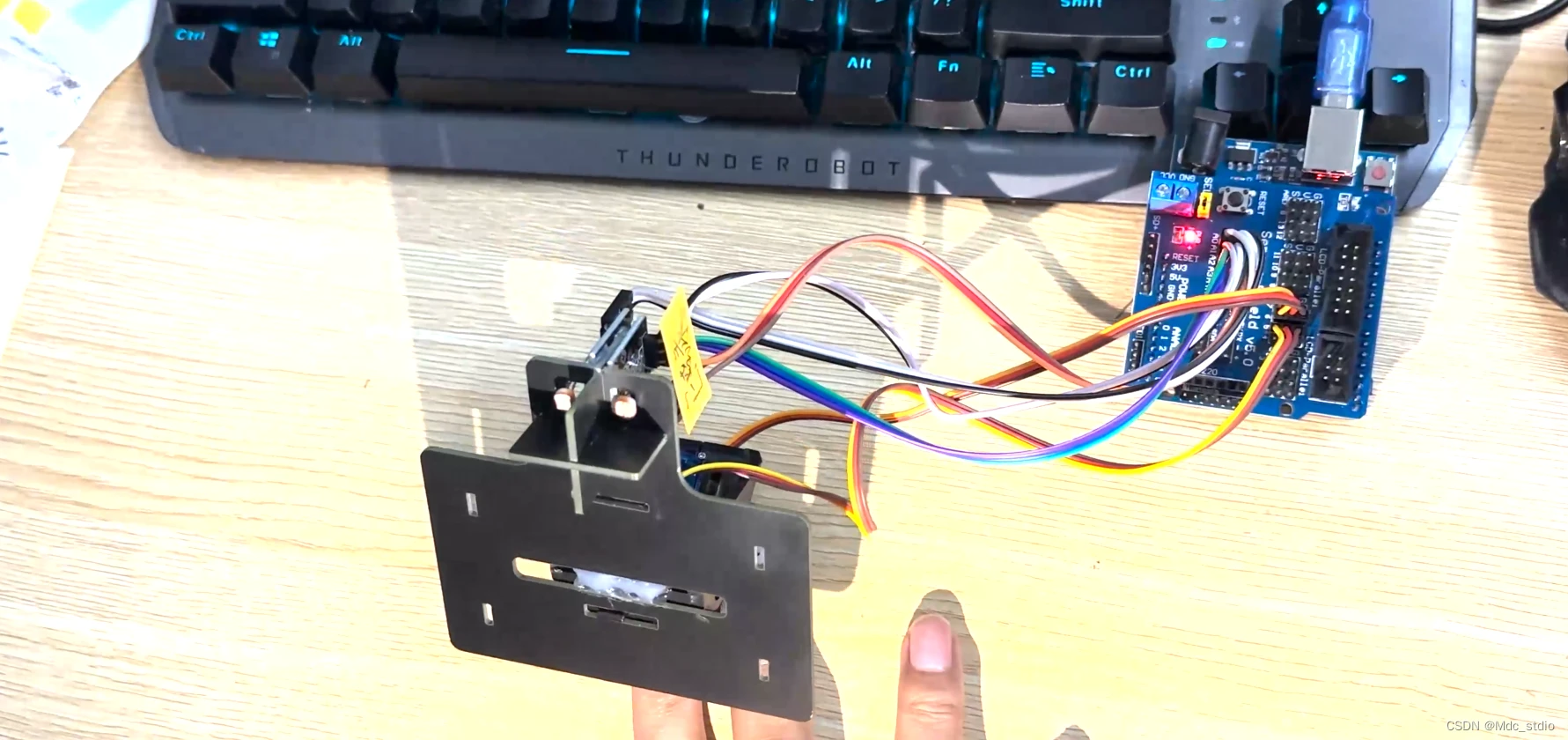
基于Arduino Uno单片机的太阳能追踪系统,其基本原理是根据太阳位置变化实现太阳能电池板的追踪,以提高太阳能转换效率。具体原理如下:
- 光敏电阻检测太阳位置:通过光敏电阻检测太阳的位置,实时反馈太阳位置数据。
- 获取太阳运行轨迹:基于太阳位置变化,获取太阳在天空中的运行轨迹,并将其转化为相应的运动学参数。
- 控制舵机:通过Arduino Uno单片机控制步进电机搭载太阳能电池板来运动,接近太阳的实际位置。
- PID控制算法:Arduino Uno单片机采用PID控制算法控制舵机,对太阳能电池板进行精确修正。
- 自动调整:系统可按照设定的参数自动调整太阳能电池板的角度,使之始终正对太阳,以实现最大化能量转换。
综上所述,基于Arduino Uno单片机的太阳能追踪系统,通过对太阳的位置变化进行检测和不断调整太阳能电池板的角度,从而实现了太阳能追踪的过程。该系统采用PID控制算法,具有自动调整的功能,可在太阳运行轨迹发生变化的情况下进行精确定位。这种系统具有稳定性高、自动调整能力强等特点,可大幅提高太阳能转换效率。
磊项目综合综合评分(每项满分5分)
- 难度系数:3分
- 工作量:4分
- 创新点:5分
本系统将由硬件系统和软件系统构成,其中硬件系统包含微控制器和IIC总线以及惯性传感器等硬件模块,软件系统则包含了下位机主控软件模块、数据采集软件模块、姿态解算软件模块以及上位机可视化软件模块等。其中惯性传感器模块选用MPU6050惯性传感器,软件模块方面,开发板IDE采用Arduino IDE,上位机使用processing平台完成可视化功能的实现。

磊项目综合综合评分(每项满分5分)
- 难度系数:2分
- 工作量:4分
- 创新点:4分
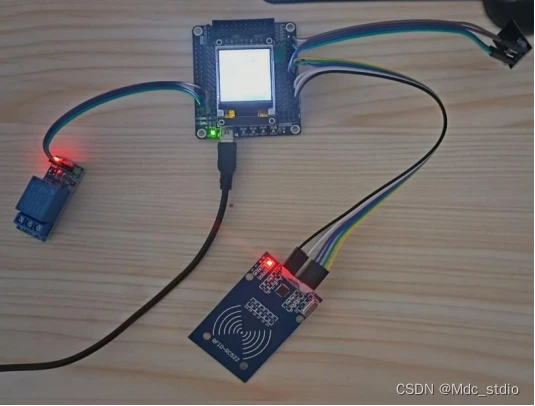

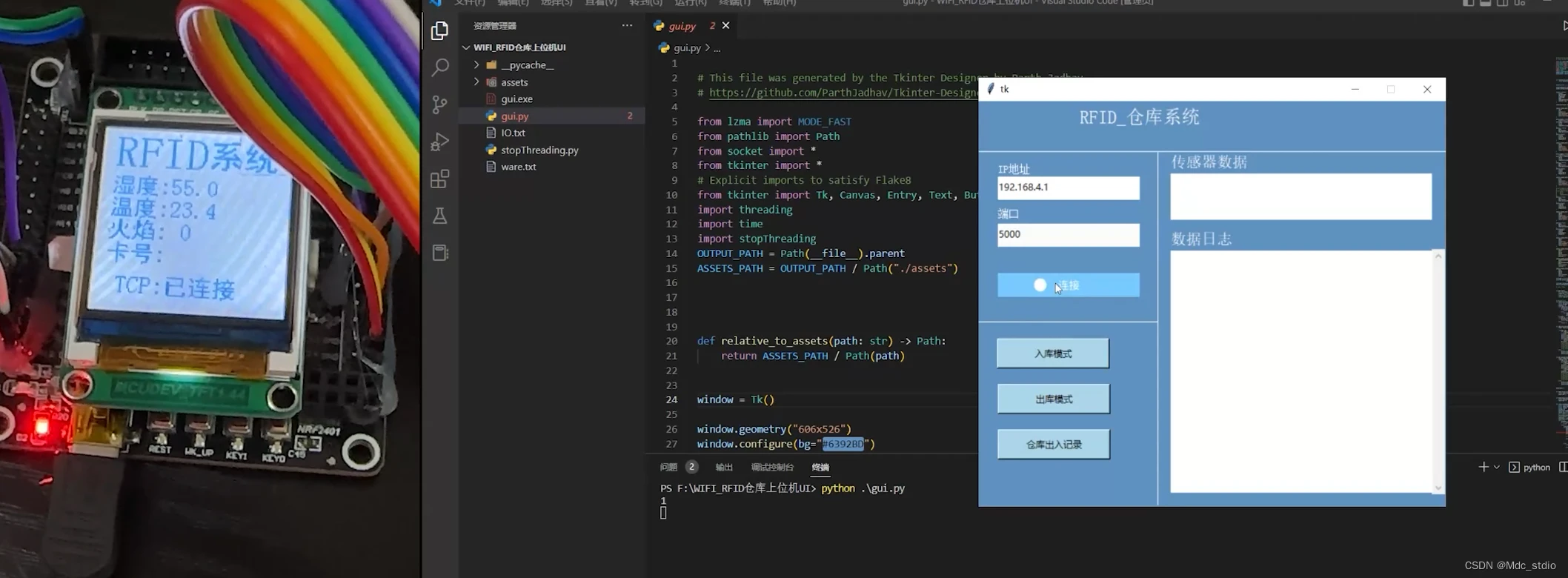
本系统采用STM32单片机作为下位机外接RFID传感器来实时读取货物的出入库状态。通过WiFi模块接收远程嵌入式部分发送的交互数传送给上位机,使上位机采用Python语言结合Tkinter GUI框架,构建一个C/S架构上位机端的仓库管理系统。
磊项目综合综合评分(每项满分5分)
- 难度系数:2分
- 工作量:3分
- 创新点:4分
刺 项目分享:见文末!
未完待续,关注DD学长,持续更新 。。。
到此这篇单片机设计论文研究方向如何填写的(单片机设计论文研究方向如何填写的呢)的文章就介绍到这了,更多相关内容请继续浏览下面的相关推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/hd-api/50775.html