
算法是作用于具体数据结构之上的,深度优先搜索算法和广度优先搜索算法都是基于“图”这种数据结构的。这是因为,图这种数据结构的表达能力很强,大部分涉及搜索的场景都可以抽象成“图”。
图上的搜索算法,最直接的理解就是,在图中找出从一个顶点出发,到另一个顶点的路径。为了搞清楚图的搜索算法,必须先把图的存储方式理解透彻。
图有多种存储方法,最常用的两种分别是:邻接矩阵和出边数组。
邻接矩阵的存储方式如下图所示,底层依赖一个二维数组。
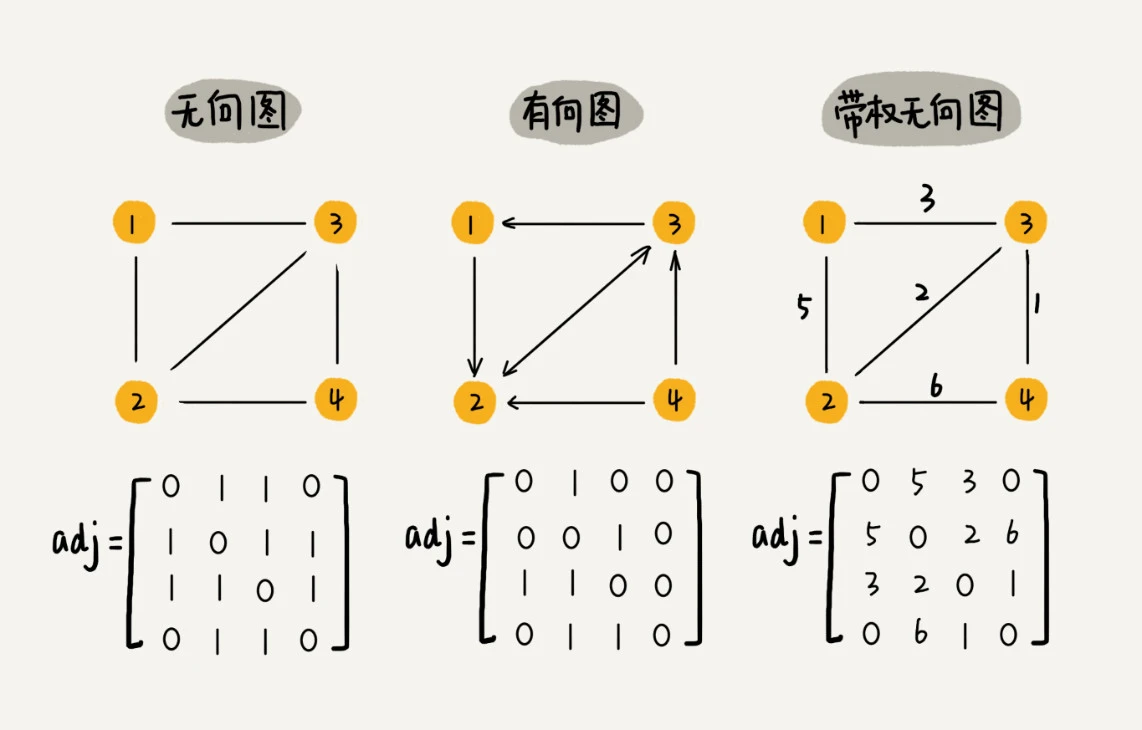
对于无向图来说,如果顶点i与顶点j之间有边,我们就将A[i][j]和 A[j][i]标记1;对于有向图来说,如果顶点i到顶点j之间,有一条箭头从顶点i指向顶点j的边,那我们就将A[i][j]标记为1。同理,如果有一条箭头从顶点j指向顶点i的边,我们就将A[j][i]标记为1。对于带权图,数组中就存储相应的权重。
用邻接矩阵来表示一个图,虽然简单、直观,但是比较浪费存储空间。对于无向图来说,如果A[i][j]等于1,那A[j][i]也肯定等于1。实际上,我们只需要存储一个就可以了。也就是说,无向图的二维数组中,如果我们将其用对角线划分为上下两部分,那我们只需要利用上面或者下面这样一半的空间就足够了,另外一半白白浪费掉了。
针对上面邻接矩阵比较浪费内存空间的问题,出边数组可以避免空间浪费。如下图所示,每个顶点对应一条链表,链表中存储的是与这个顶点相连接的其他顶点。
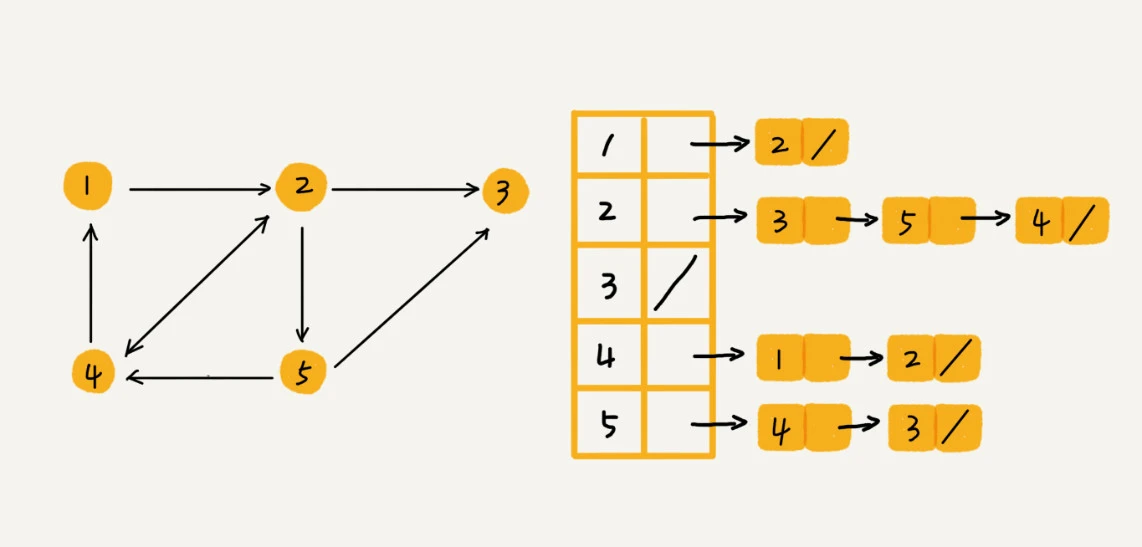
例如上图中,我们要确定,是否存在一条从顶点2到顶点4的边,那我们就要遍历顶点2的所有出边,看出边是否能到达顶点4。所以,比起邻接矩阵的存储方式,在出边数组中查询两个顶点之间的关系就没那么高效了。
深度优先搜索用的是一种比较著名的算法思想,回溯思想。这种思想解决问题的过程,非常适合用递归来实现。例如下图中演示了用深度优先搜索的思想寻找一条从点s到点c的路径的方法。从图中我们可以看出,深度优先搜索找出来的路径,并不是点s到点c的最短路径。
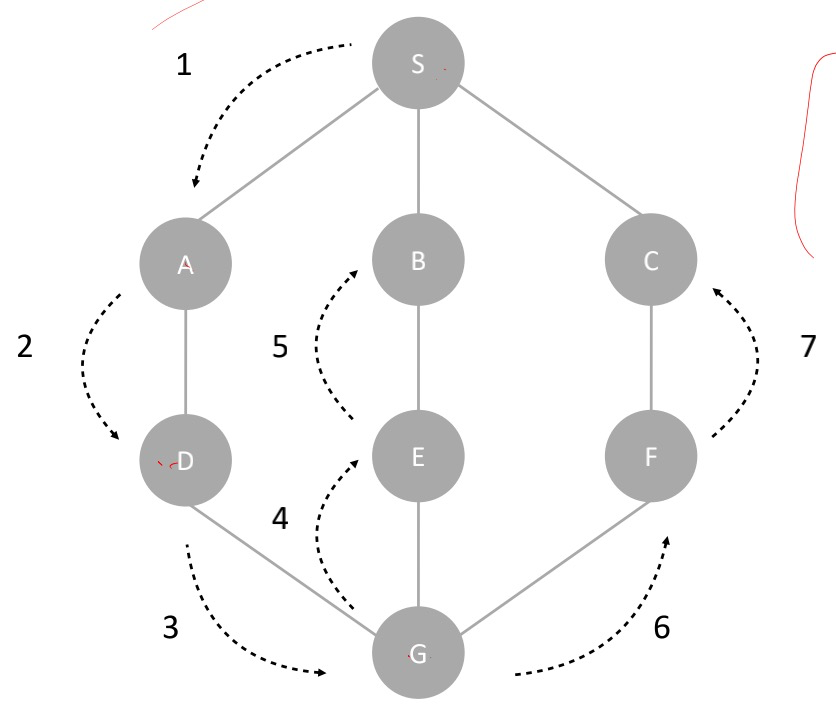
我把上面的过程用递归的形式写下来如下。深度优先搜索代码里,有个比较特殊的全局变量found,它的作用是,当我们已经找到终止点之后,我们就不再递归地继续查找了。
理解了深度优先搜索算法之后,深度优先搜索的时间、空间复杂度是多少呢?从示意图可以看出,每条边最多会被访问两次,一次是遍历,一次是回退。所以,图上的深度优先搜索算法的时间复杂度是O(E),E表示边数。深度优先搜索算法的消耗内存主要是visited、数组和递归调用栈。visited数组的大小跟顶点的个数V成正比,递归调用栈的最大深度不会超过顶点的个数,所以总的空间复杂度就是O(V)。
广度优先搜索直观地讲,就是一种“地毯式”层层推进的搜索策略,即先查找离起始顶点最近的,然后是次近的,依次往外搜索。理解起来并不难,示意图如下。
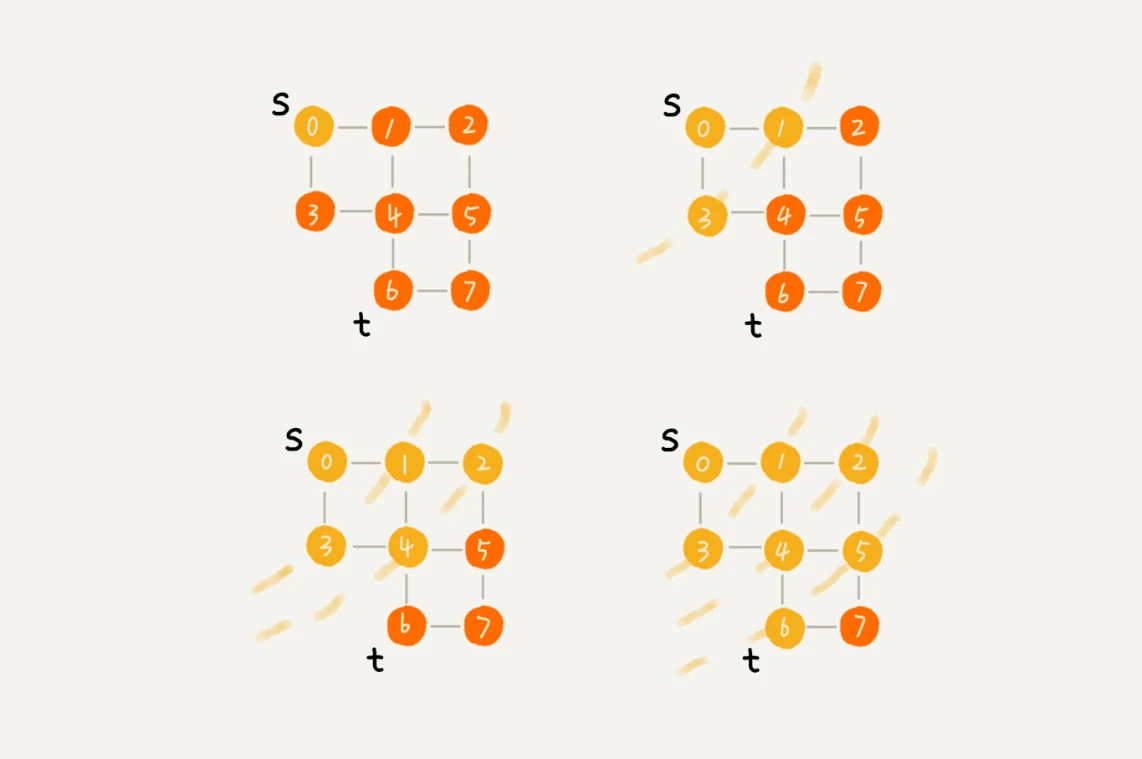
尽管广度优先搜索的原理挺简单,但代码实现还是稍微有点复杂度。实际上,这样得到的一条路径就是从起始点到指定点的最短路径。
BFS代码中的queue是一个队列,用来存储已经被访问、但相连的顶点还没有被访问的顶点。因为广度优先搜索是逐层访问的,也就是说,我们只有把第k层的顶点都访问完成之后,才能访问第k+1层的顶点。当我们访问到第k层的顶点的时候,我们需要把第k层的顶点记录下来,稍后才能通过第k层的顶点来找第k+1层的顶点。所以,我们用这个队列来实现记录的功能。
广度优先搜索的时间、空间复杂度是多少呢?最坏情况下,终止顶点t离起始顶点s很远,需要遍历完整个图才能找到。这个时候,每个顶点都要进出一遍队列,每个边也都会被访问一次,所以,广度优先搜索的时间复杂度是 O(V+E),其中,V表示顶点的个数,E表示边的个数。当然,对于一个连通图来说,也就是说一个图中的所有顶点都是连通的,E肯定要大于等于V-1,所以,广度优先搜索的时间复杂度也可以简写为O(E)。空间消耗主要在几个辅助变量visited数组、queue队列上。这三个存储空间的大小都不会超过顶点的个数,所以空间复杂度是O(V)。
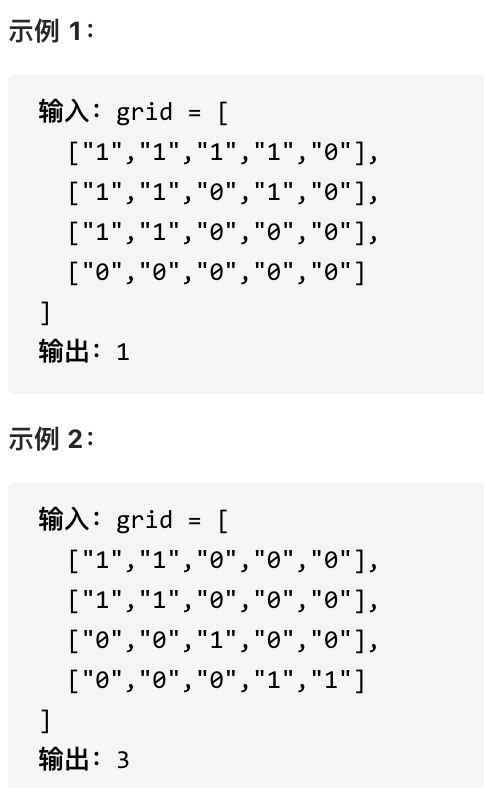
样题一:岛屿的数量
给你一个由’1’(陆地)和 ‘0’(水)组成的的二维网格,请你计算网格中岛屿的数量。岛屿总是被水包围,并且每座岛屿只能由水平方向和/或竖直方向上相邻的陆地连接形成。此外,你可以假设该网格的四条边均被水包围。
DFS的思路:将二维网格看成一个无向图,竖直或水平相邻的点’1’之间有边相连。为了求出岛屿的数量,我们可以扫描整个二维网格。如果一个位置为’1’,则以其为起始节点开始进行深度优先搜索。在深度优先搜索的过程中,每个搜索到的’1’都会被重新标记。
最终岛屿的数量就是我们进行深度优先搜索的次数。
同样地,我们也可以使用广度优先搜索代替深度优先搜索。
BFS的思路:为了求出岛屿的数量,我们可以扫描整个二维网格。如果一个位置为‘1’,则将其加入队列,开始进行广度优先搜索。在广度优先搜索的过程中,从原点出发能到达的每个点‘1’都会被重新标记。直到队列为空,搜索结束。
最终岛屿的数量就是我们进行广度优先搜索的次数。
样题二:被包围的区域
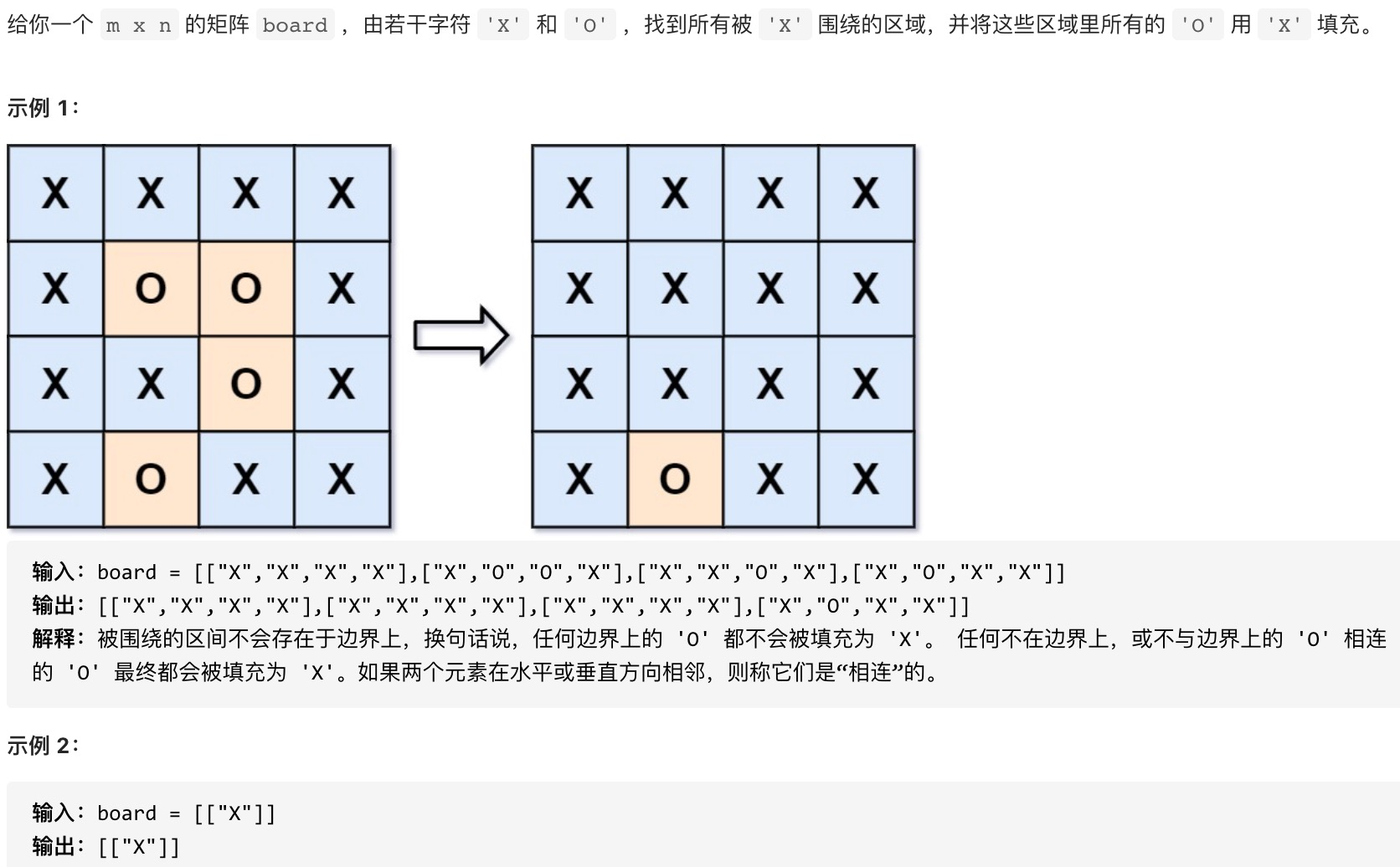
注意关键解释:被围绕的区域不会存在于边界上,换句话说,任何边界上的 ‘O’ 都不会被填充为 ‘X’。 任何不在边界上,或不与边界上的 ‘O’ 相连的 ‘O’ 最终都会被填充为 ‘X’。如果两个元素在水平或垂直方向相邻,则称它们是“相连”的。
问题可以转化为:从边界上的‘O’出发所有能被访问到的‘O’都不能被填充为’X’,剩下的‘O’可以被填充为’X’,这是一个搜索问题。
思路:将所有存在于边界上的点’O’都打上标记,例如标记为’#‘,然后从这些点出发作搜索,所有能到达的点’O’也打上标记’#‘,最后将矩阵中所有标记为’#‘的点都填充为’O’,所有为’O’的点都填充为’X’。
DFS思路下的代码。
BFS思路下的代码。
样题三:省份数量
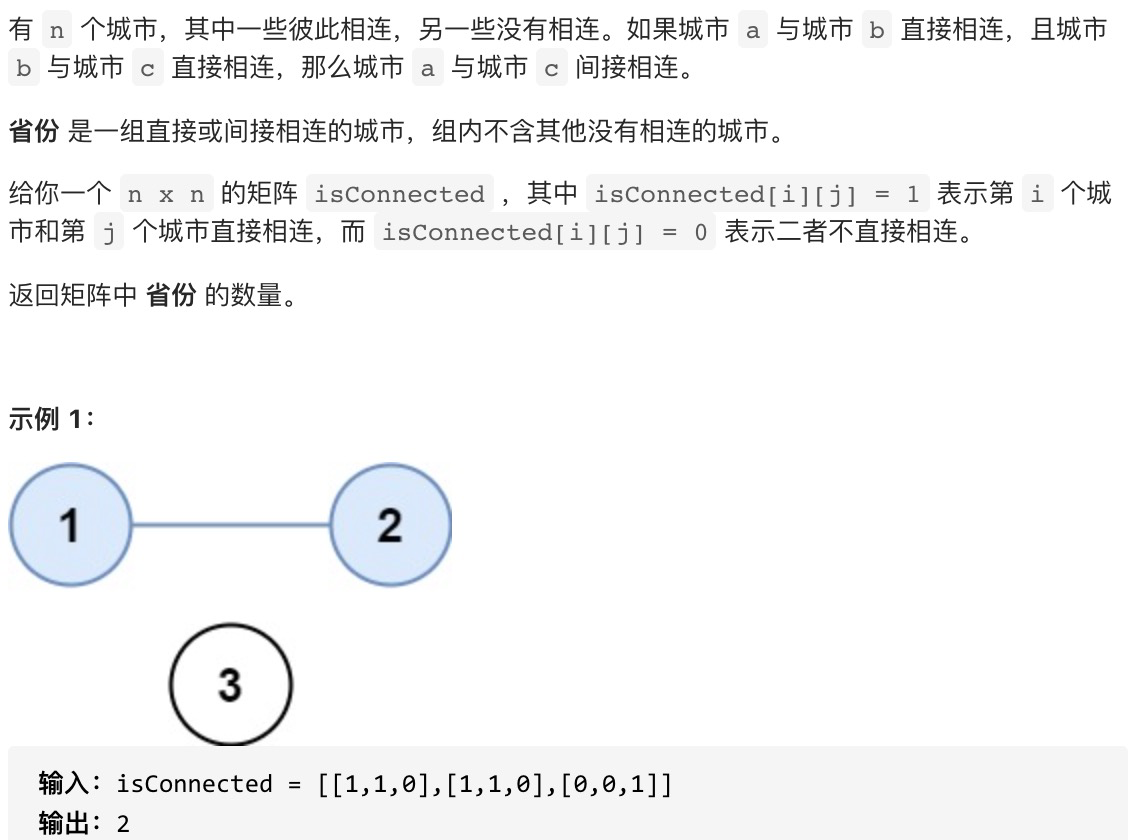
思路:给出的矩阵isConnected其实就是典型的邻接矩阵,这种图的存储方式很简洁。对于无向图,矩阵按对角线对称。问题可以转化成求无向图中连通块的个数,顶点数量为n,顶点的编号为0到n-1,矩阵isConnected描述了各个顶点的连接情况(矩阵中有一半信息是冗余的)。只需要从一个顶点出发遍历其能到达的其他所有顶点,当前顶点与其能到达的其他顶点构成连通块,统计这样的连通块的个数。
DFS与BFS的思路都能解决此问题,代码如下:
样题四:马走日
马在中国象棋以日字形规则移动,给定一个大小为n*m的棋盘,并指定一个初始坐标(x,y),要求不能重复经过棋盘上的同一个点,计算马可以有多少种途径可以遍历棋盘上的所有点,输出一个整数,表示马能遍历棋盘所有点的途径总数,若无法遍历所有点则输出0。输入的测试数据为一行四个整数,分别表示棋盘的大小以及初始位置坐标n、m、x、y。
样例输入:
样例输出:
思路:使用深搜去搜索,每走到一个点就做上标记,在一条路走到底的时候,取消已遍历节点的标记,标记的节点数大于棋盘上的总节点数则为一种遍历方法,停止遍历,累计遍历方法即可。
样题五:马走日-最小步数
马在中国象棋以日字形规则移动,给定一个大小为n*m的棋盘,并指定一个初始位置(x,y)和目标坐标(targetX,targetY),求出马从最初位置到目标位置所走的最少步数,若无法走到目标位置返回-1。
样例输入,棋盘是8X8,初始位置为(0,0),目标位置为(2,0)
样例输出,最小步数为2
思路:采用BFS的方法。1、把起点放入到队列中;2、队列非空,取下一次可以跳到的位置,如果这个位置此前没有被访问,这表示可以进行访问,因为存在回溯的情况,把位置加入到队列中;3、如果此时可以调的位置等于目标位置,则输出最短步长。BFS遍历一遍棋盘,时间复杂度 O(n*m)。
广度优先搜索,通俗的理解就是,地毯式层层推进,从起始顶点开始,依次往外遍历,遍历得到的路径就是,起始顶点到终止顶点的最短路径。广度优先搜索需要借助队列来实现。深度优先搜索用的是回溯思想,非常适合用递归实现。二者是图上的两种最常用、最基本的搜索算法,比起其他高级的搜索算法,比如A*、IDA*等,要简单粗暴,没有什么优化,所以,也被叫作暴力搜索算法。所以,这两种搜索算法仅适用于状态空间不大,也就是说图不大的搜索。
到此这篇广度优先搜索和深度优先搜索都属于什么算法(广度优先搜索和深度优先搜索的使用场合)的文章就介绍到这了,更多相关内容请继续浏览下面的相关推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/rgzn-sdxx/54831.html