
内容抄自CSDN点云侠:【2024最新版】PCL点云处理算法汇总(C++长期更新版)。质量无忧,永久免费,可放心复制粘贴。
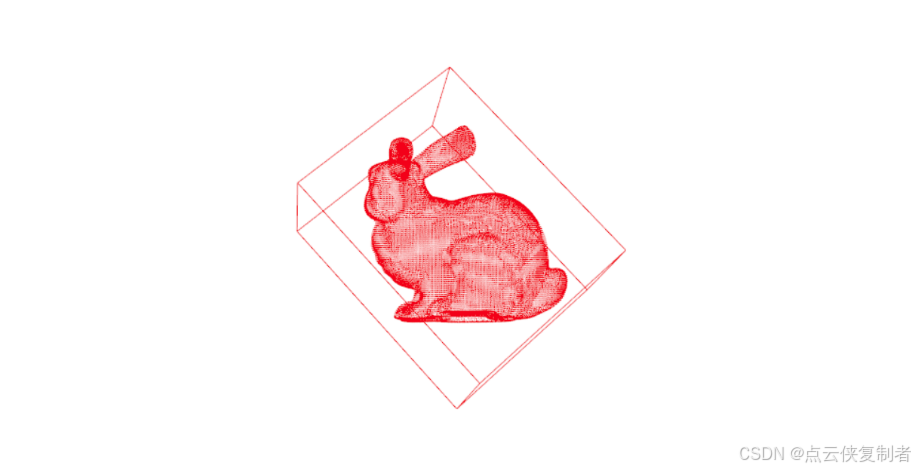
点云包围盒(Bounding Box)是描述三维空间中点云数据外边界的最小矩形盒,用于精确描述物体的大小、位置、方向等信息。在处理3D数据时,计算包围盒可以有效地简化碰撞检测、缩放、旋转等几何操作。通过主成分分析(PCA)技术,可以根据点云的主轴方向构建包围盒,使包围盒的方向与物体的几何形状更加接近,从而提高空间占用效率。
计算两点云(Point Clouds)之间的最小距离通常是指找到两个点集中所有对应点对中最短的距离。这在计算机视觉、机器学习以及三维几何分析中有应用,比如物体识别、扫描数据处理等。
最小包围盒的计算过程大致如下:
1.利用PCA主元分析法获得点云的三个主方向,获取质心,计算协方差,获得协方差矩阵,求取协方差矩阵的特征值和特长向量,特征向量即为主方向。
2.利用1中获得的主方向和质心,将输入点云转换至原点,且主方向与坐标系方向重回,建立变换到原点的点云的包围盒。
3.给输入点云设置主方向和包围盒,通过输入点云到原点云变换的逆变换实现。
最小包围盒顶点计算的过程大致如下:
1.输入点云转换至远点后,求得变换后点云的最大最小x,y,z轴的坐标,此时(max.x,max.y,max.z),(max.x,min.y,max.z),(max.x,max.y,min.z),(min.x,max.y,max.z),(min.x,max.y,min.z),(min.x,min.y,max.z),(min.x,min.y,max.z),(min.x,min.y,min.z)
即为变换后点云的包围盒,也是原始输入点云包围盒顶点坐标经过变化后的坐标.
2.将上述求得的6个包围盒坐标逆变换回输入点云的坐标系,即得到原始输入点云的包围盒顶点坐标.
点云OBB包围盒(Oriented Bounding Box,即定向边界框)是计算机图形学中常用的一种表示三维数据集紧凑外接形状的方式,特别适用于处理密集的点云数据。PCA(Principal Component Analysis,主成分分析)在这里的应用主要是为了简化和降维,减少计算复杂度,并提取数据的主要特征。
PCA在点云OBB求解中的应用场景包括:
- 数据预处理:通过PCA可以识别并保留点云中的主要方向和模式,去除噪声,提高后续计算的精度和效率。
- 压缩存储:对于大尺寸点云,PCA可以帮助构建更小的、代表性的模型,节约存储空间。
- 快速搜索和匹配:在物体识别和相似性查找中,利用PCA生成的小型OBB更容易进行比较和匹配。
- 碰撞检测:在游戏引擎或机器人导航等场景中,用于快速判断是否发生物体间的碰撞。
计算点云(Point Cloud)的最小外包八面体(OBB,Octahedral Bounding Box),即使用PCA(Principal Component Analysis,主成分分析)方法,通常用于数据压缩和简化处理。以下是使用PCA注意的一些事项:
- 数据预处理:首先,需要对点云数据进行清洗和标准化,去除噪声、异常值,并确保所有的坐标都是在同一尺度下。
- PCA基础向量计算:选择合适的点(如质心附近的点)构建协方差矩阵,然后求其特征值和特征向量。最大的三个特征值对应的特征向量就是数据的主要方向。
- 原点旋转和平移:为了得到OBB,需要将原始点云沿着这三大主轴旋转并平移到新的坐标系,使得其中一个方向成为长边,其余两个方向分别对应宽和高。
- 简化维度:如果只需要OBB的基本尺寸信息,可以仅保留这三个主向量进行计算,忽略其他方向的影响。
- 边界检查:最后,确保生成的OBB包含所有点,如果边界过大,可能是因为数据分布不均匀或者噪声过多,需要调整参数或进一步优化算法。
版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/haskellbc/31049.html