
控制要求:运动轴在一定范围内实现多段速无缝切换,我们称为实时变速,在实时变速的过程中,主要是通过对电机位移值
的比较,再修改速度,从而达到实时变速的目的。
接通M00一次,电机先以100%的速度起步,正向运行,总位移长是50000的脉冲;
当电机运行到5000的脉冲位置时,电机速度切换到300%;
当电机运行到15000的脉冲位置时,电机速度切换到500%;
当电机运行到30000的脉冲位置时,电机速度切换到800%;
当电机运行到40000的脉冲位置时,电机速度切换到400%;
当电机运行到45000的脉冲位置时,电机速度切换到200%;
运动轴程序在时序环编辑,先给启动信号,设定电机初始速度,然后将电机运行的位移量设置到50000,往下程序
就是对电机运行的位移量进行比较,用“逻辑比较”的指令,然后就直接用“速度控制”指令改变速度,这样就可以
实现电机速度无缝切换。
实时变速用到的指令:速度控制、单轴运动、逻辑比较、单轴等待。
我们在时序环0中编写程序:
第00步:等待<M0 变速按钮>通信号连续保持1次扫描
第01步:速度控制_单轴A1 ,常数值:100
第02步:单轴运动,方式:增量,方向:+,轴号A1,位移值:50000
第03组:将参数1与参数2的值进行比较作为条件
第04步:速度控制_单轴A1 ,常数值:300
第05组:将参数1与参数2的值进行比较作为条件
第06步:速度控制_单轴A1 ,常数值:500
第07组:将参数1与参数2的值进行比较作为条件
第08步:速度控制_单轴A1 ,常数值:800
第09组:将参数1与参数2的值进行比较作为条件
第10步:速度控制_单轴A1 ,常数值:400
第11组:将参数1与参数2的值进行比较作为条件
第12步:速度控制_单轴A1 ,常数值:200
第13步:单轴等待-轴号A1,等待轴状态:停止状态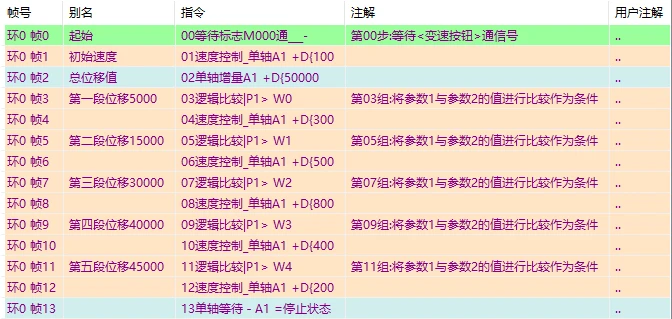
想了解更多JENASI(简纳思)PLC控制逻辑,请持续关注我们
到此这篇plc定时器100ms定时范围(plc定时器100ms定时范围编号)的文章就介绍到这了,更多相关内容请继续浏览下面的相关 推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/cjjbc/11945.html