
遇到困难,不懂指令、逻辑等,按下F1找文档,或查官方使用教程,说明书。
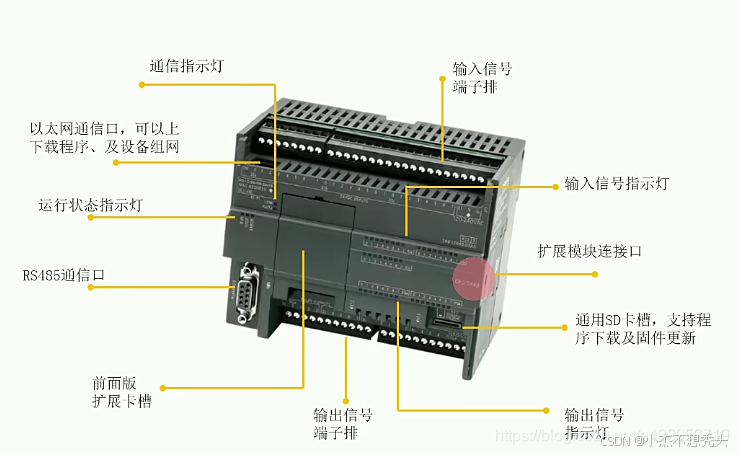
1、机型丰富,扩展选件多样。
2、集成以太网口和RS485串口
3、三轴脉冲输出端(CPU本体上的Q0.0,Q0.1和Q0.3可组态为高速脉冲输出)
4、S7-200 SMART编程软件升级
PLC选型:晶体管输出:开关比较频繁,24V供电
继电器输出:开关不频繁,220V供电

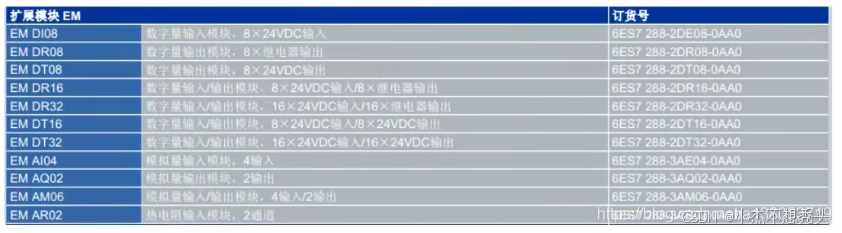
扩展模块选型:
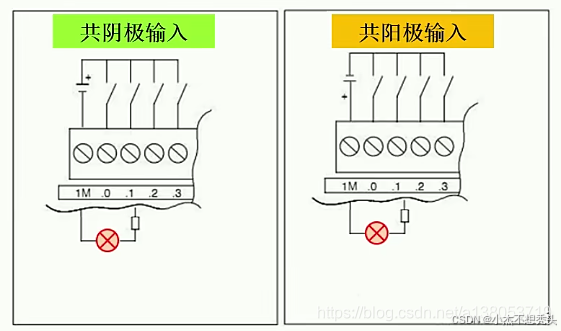
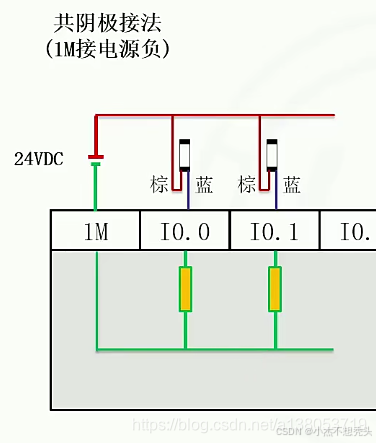
共阴级输入:1M端接电源负,则I点输入用电源的正。
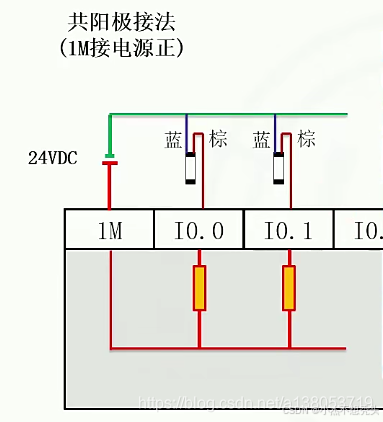
共阳极输入:1M端接电源正,则I点输入用电源的负。
两线制的传感器实际上和开关是一样,只是带有正负
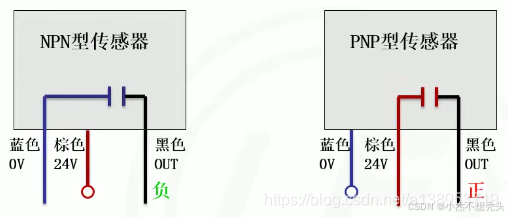
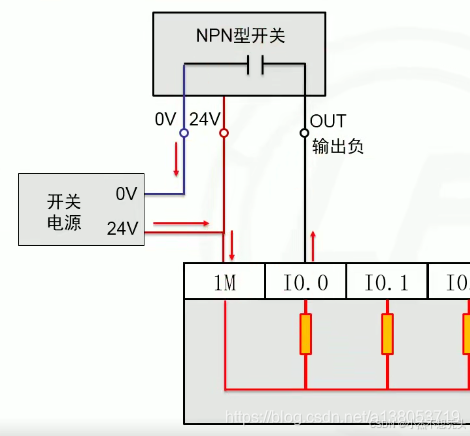
1、NPN型传感器,输出信号为负
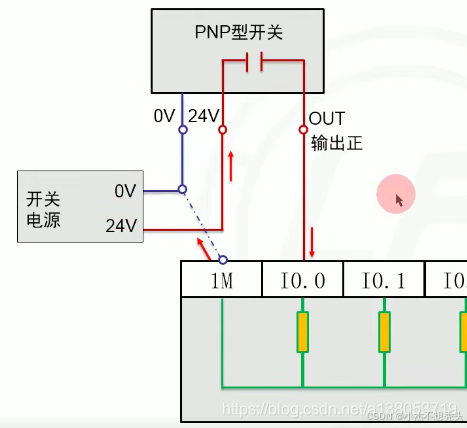
2、PNP型传感器,输出信号为正
3、有四线制的传感器,只是将输出信号分为了常开和常闭两种信号
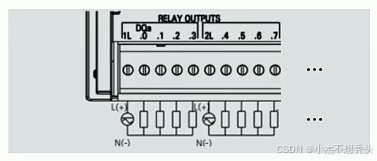
继电器输出特点:
①可以带交、直流负载。可以通过相对较大的电流(约为 标题2A左右)
②输出触点响应时间相对较慢,约为10ms。在有需要高速脉冲输出控制(如需要控制步进或伺服系统)时不能选用继电器输出类型的PLC
接线:
继电器输出就是一组组的开关,我们主要是使用开关来接通电流驱动负载
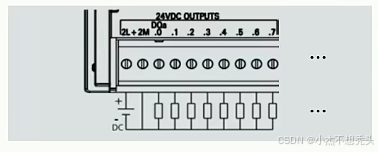
晶体管输出特点:
①输出触点响应时间快,约为0.2ms以下,经常应用在需要高速输出响应的系统里
②只能通过5-30VDC电压,通过电流小(约为500MA左右)
接线:
①西门子晶体管输出为源型输出,输出电源正,可以直接驱动24V负载
②2L+/2M必须如下图所示接入电源,否则输出点不会有信号
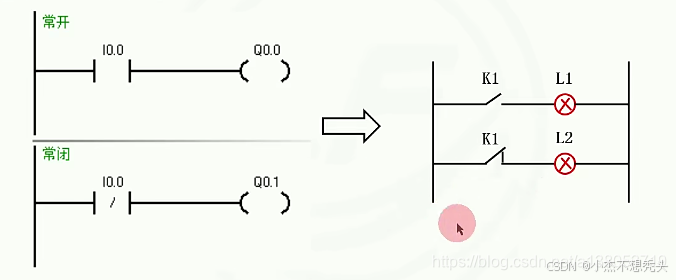
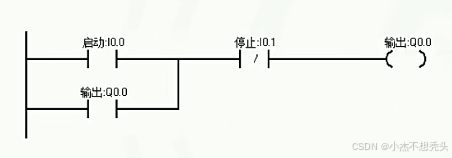
8.1常开 常闭 线圈
8.2上升沿 下降沿
上升沿:指的就是信号,从OFF转向ON的那一瞬间接通。
下降沿:指的就是信号,从ON转向OFF的那一瞬间接通。

复位指令R:当执行复位指令时,将对应的寄存器复位为OFF。


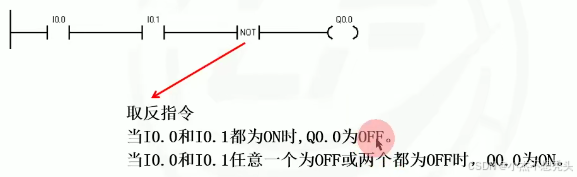
8.4取反指令
取反指令 NOT:取前面总逻辑的反信号
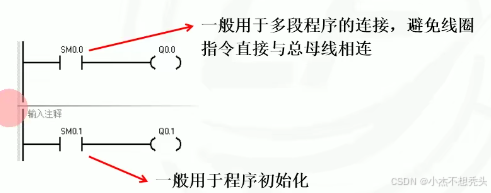
8.5特殊继电器
SM0.0:当PLC运行时,其触点会处于接通状态
SM0.1:当PLC从停止状态转至运行状态时,接通一个扫描周期
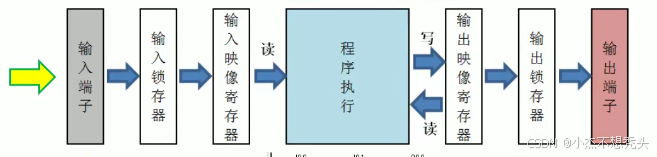
PLC工作时,先扫描输入映像的状态,并以此为基础再去扫描用户程序;程序的扫描顺序:从左往右,从上往下扫描,将扫描到的输出状态放入输出映像寄存器中。(注:这时不会直接反馈到输出端子当中)
当所有程序扫描完成后,再去扫描输出映像寄存器的状态并刷新到输出锁存器中再反馈到输出端子中
输入映像寄存器:在一个扫描周期内保持不变
元件映像寄存器:包括输出,中间辅助寄存器,在一个扫描周期内可写可读,所以在一个扫描周期内,元件的结果可以被覆盖
循环的技巧:
1、串联常闭,
常闭断掉能流,重新开始计时。
2、并联常开。
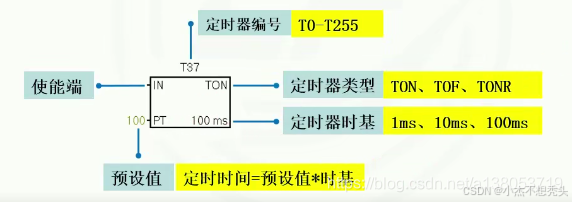
10.1类型 编号 时基说明
S7-200 SMART PLC中,按工作方式的不同,可以将定时器分为通电延时型定时器TON,断点延时定时器TOF和有记忆接通延时定时器TONR

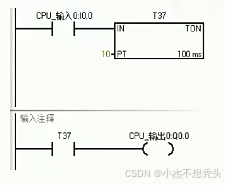
10.2定时器TON使用说明
当使能端输入有效时,定时器开始计时,当前值从0开始计时,当前值大于或等于预设值时,定时器常开触点闭合,常闭触点断开。当使能端无效时,定时器复位,当前值清零。
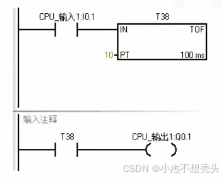
10.3定时器TOF使用说明
当使能端输入有效时,定时器常开触点关闭,定时器清零,当使能端断开时,当前值从0开始计时,当前值等于预设值时,定时器复位并停止计时,当前值保持。
10.4定时器TONR使用说明
TON定时器基础上加了记忆功能,有记忆接通延时定时器需用复位指令进行复位,当前值清零。

计数器是用来计数的编程元件,分为增计数器、减计数器和增减计数器。
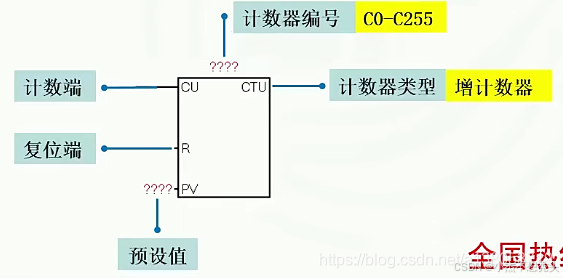
11.1增计数器CTU使用说明
①当计数端CU有上升沿脉冲输入时,计数器的当前值加1,当当前值大于或等于预设值(PV)时,计数器的状态为被置1,常开触点闭合,常闭触点断开。
②达到预设值后,计数端检测到上升沿脉冲信号,计数器当前值会继续增加。
③当复位端的状态为1时,计数器复位,当前值被清零。
④计数的范围0~32767。
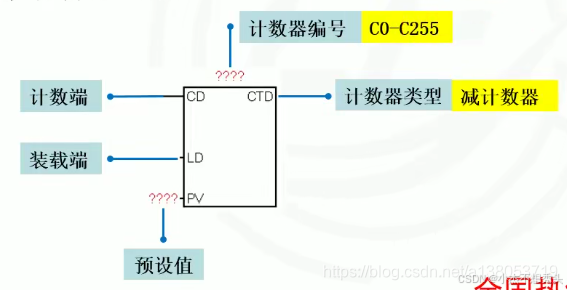
11.2减计数器CTD使用说明
①当装载端LD的状态为1时,计数器被复位,计数器的状态位为0,预设值被装载到当前值的寄存器中;当装载端LD的状态为0时,计数端CD脉冲输入有效,计数器可以计数。
②当前值减为0时,计数器常开触点闭合,常闭触点断开。计数端再输入脉冲信号,不会计数。
③计数的范围0~32767。
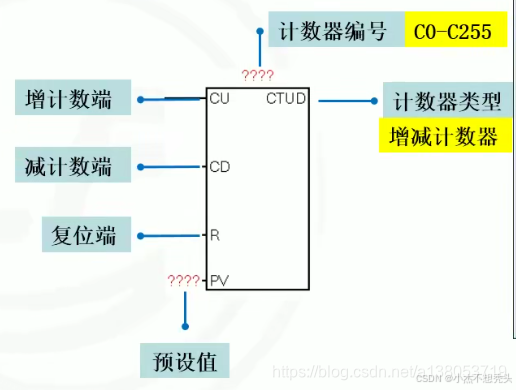
11.3增减计数器CTUD使用说明
①当增计数端CU有上升沿脉冲输入时,计数器的当前值加1。
②当减计数端CD有上升沿脉冲输入时,计数器的当前值减1。
③当复位端的状态为1时,计数器复位,当前值被清零。
④计数范围-32768~32767。

DIV 常用。可用于产品奇偶性判断。除以2取余数。
在这里插入图片描述
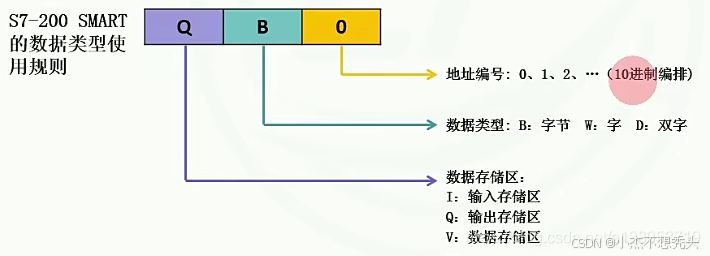
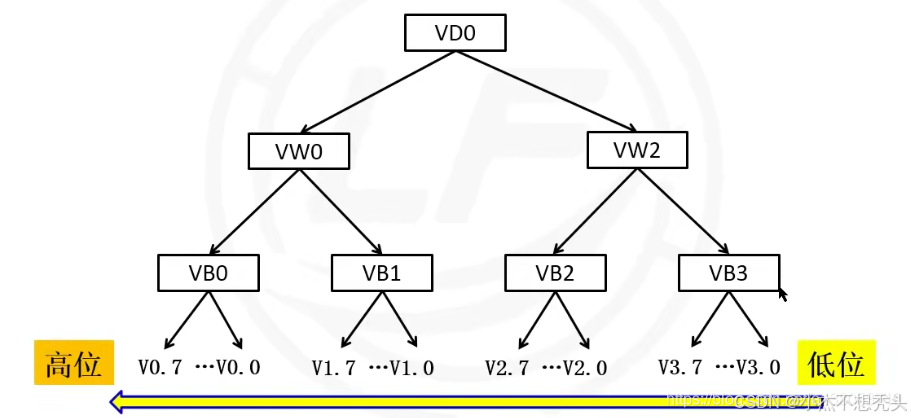
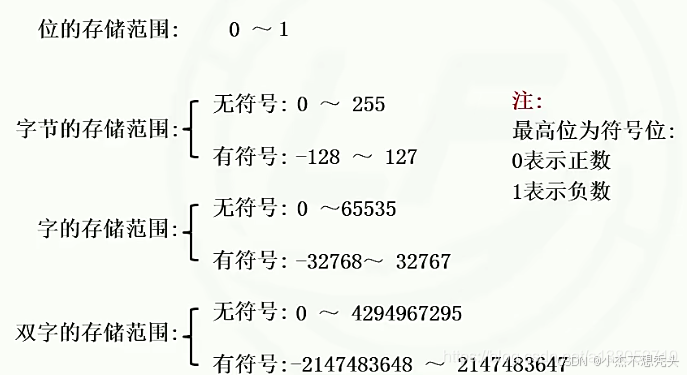
1、 位:,1和0,接通和断开。
2、字节:8个位,最大值255 。VB0/VB1/VB2
3、字:16位,最大值65535,VW0-VW2-VW4
4、双字:32位,最大值,VD0,VD4
5、整数、INT,16位,-32768–+32767,VW0,VW2
如果是正数:最高位是0,负数:最高位是1,0正1负,最高位仅仅代表符号位,不参与运算。
6、双整数、32位。
7、小数、浮点数、32位,VD0/VD4。
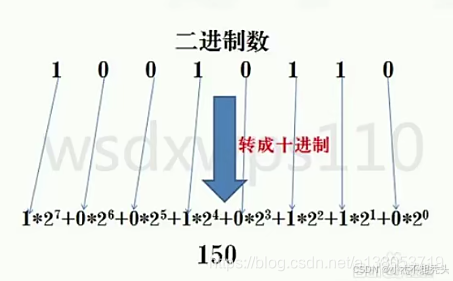
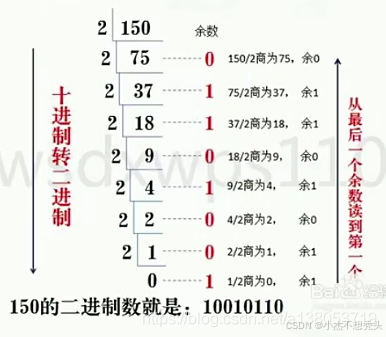
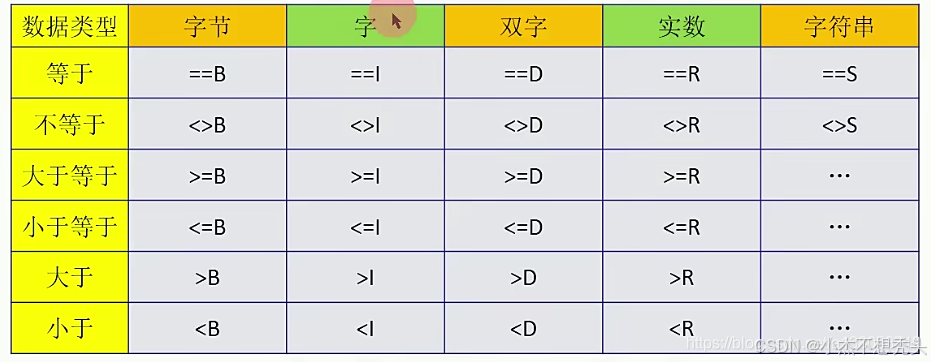
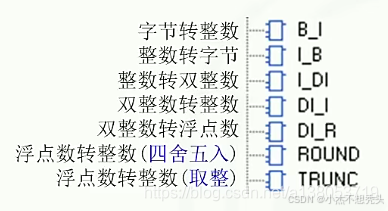
进制转换-数据类型-比较指令
时钟指令读和写
PLC程序:
主程序(MAIN)、
循环扫描、肯定会执行。一个项目只有1个主程序
SM0.0:无条件调用
子程序(SBR_0)、
1、带参子程序
1.1 编写步骤:(长方体体积)
- 新建子程序:长方体体积
- 创建变量表 地址:自动分配,LD0、LD4临时局部变量,V:全局变量
- 编写带参子程序
- 用主程序调用子程序(一般SM0.0调用)
2、不带参子程序(重点学习)
被调用时才执行。一个项目最多有128个,一般达不到。
SM0.0:无条件调用,用的多。
中断程序(INT_0)。
中断条件满足时才执行。
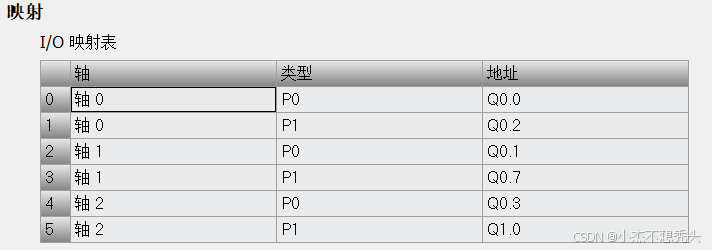
运动控制向导
A. 步进电机概念
B. PLC选型和接线
驱动器接线端子:
脉冲正:PUL+,接Q0.0
脉冲负:PUL-,
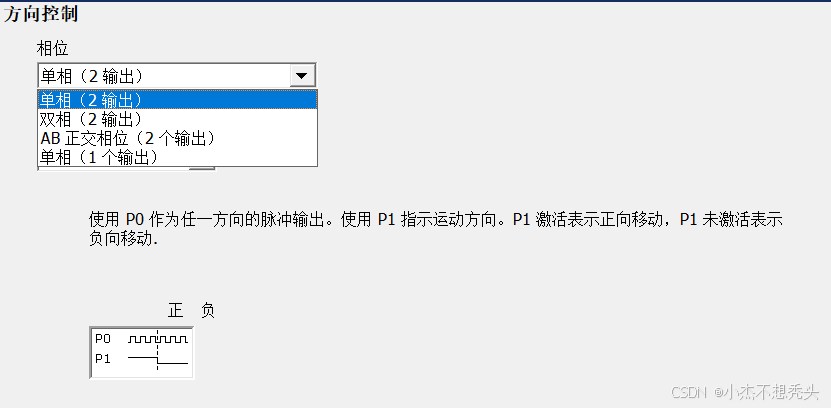
方向正:DIR+,接Q0.2
方向负:DIR-
负极0v短接后接PLC的2M端。
使能(脱机,接线停止):
ENA+
ENA-
接线图如下:

DIR+ 最好接Q0.2
C. 基础概念
脉冲:
脉冲是指在短时间内突然出现的、具有一定幅度和宽度的电信号。它的特点是持续时间短、电压或电流有明显的跳变。常见的脉冲有方波脉冲、尖脉冲等。
步进驱动器
PLC输出信号发送脉冲到步进驱动器(放大脉冲)==》连接到步进电机、带着丝杆向前运动位移。很短时间内有规律的PT0脉冲。
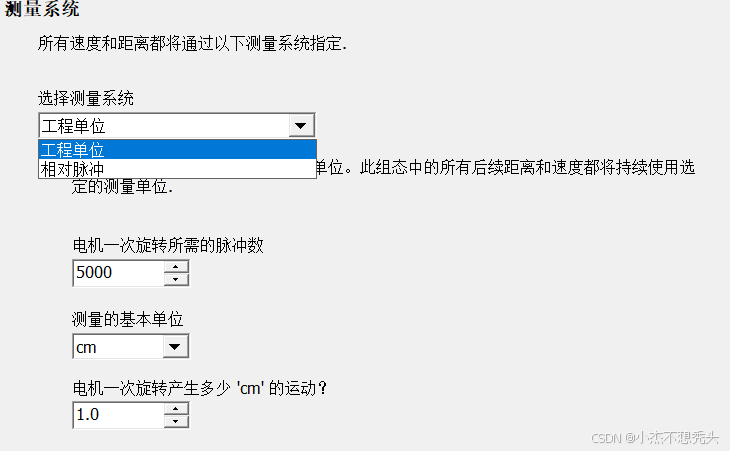
步距角:
每输入一个脉冲信号时,电机转子转过的角度称为步距角。实际采用的步进电机的步距角多为3度和1.5度。步距角越小,机加工的精度越高。
举例:一个脉冲,电机转子转1.8度,转一圈需要200个脉冲。
驱动器细分:可以调整为1600个脉冲/圈。一圈,位移走4mm
PLC中改变脉冲数、控制位移量。
导程
电机转一圈位移的距离。

步进电机手把手
步进1200
步进电机与驱动器接线

电流怎么调
1、一般步进驱动器电流大于电机电流。拨动档位开关。
D. 软件编程控制。
高速脉冲输出指令PLS:
- 高速脉冲输出PT0
- 寄存器功能表。
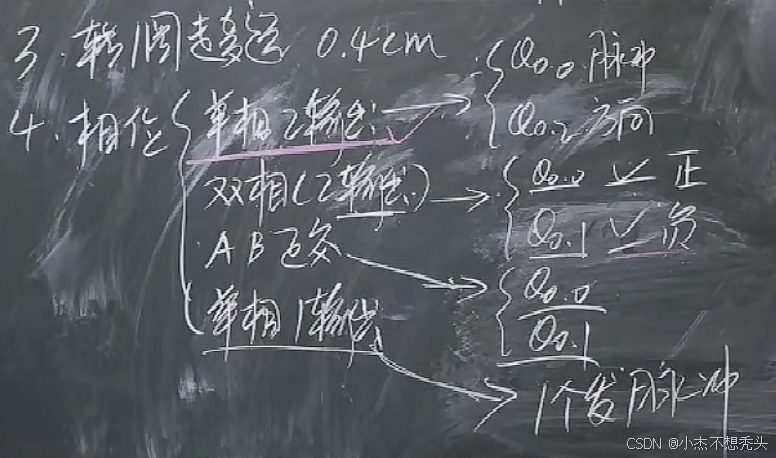
- 确定转一圈走多远,确定正方向。


SM66.7:状态位监控是否在发脉冲,0为在发,1为运行,1——> 0 ——> 1
重点,控制电机


控制电机快慢。控制电机速度,每秒多少脉冲。

传送存储脉冲数量,控制电机位移多远,控制距离
通过PLS(在计数器中)发送脉冲,PLC左下角标注0,表示Q0.0发送。必须要加沿逻辑。
Q0.2控制反方向,只要PLC的Q0.2有输出,就可以反方向转。
Q0.0发送脉冲。 按一下I0.0就可以,直到把脉冲数量SMD72中的脉冲数发完电机才停止。
停止:

按下I0.2立刻停
E. 运动控制库
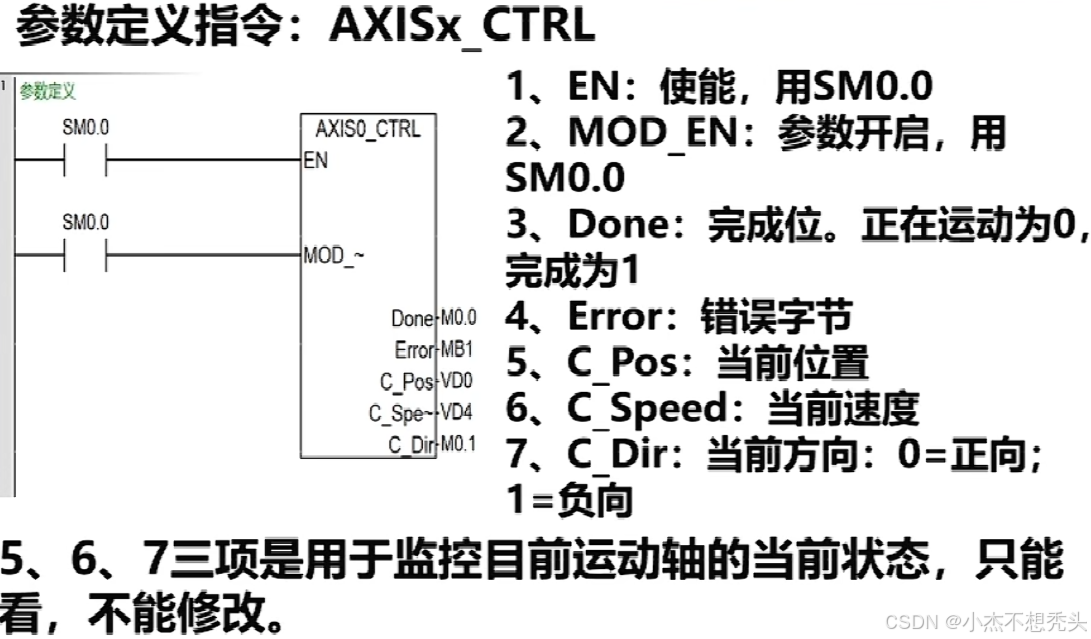
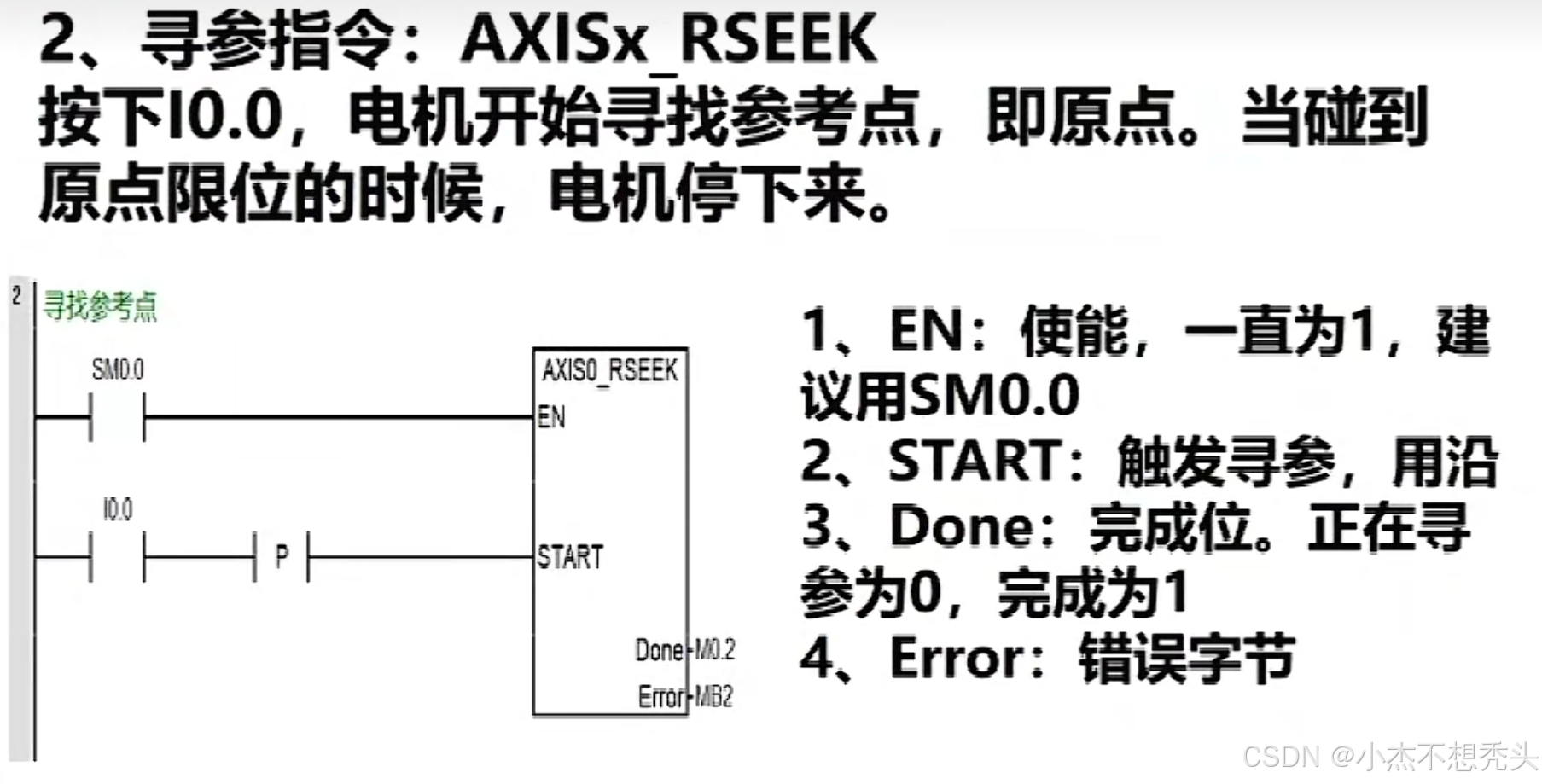
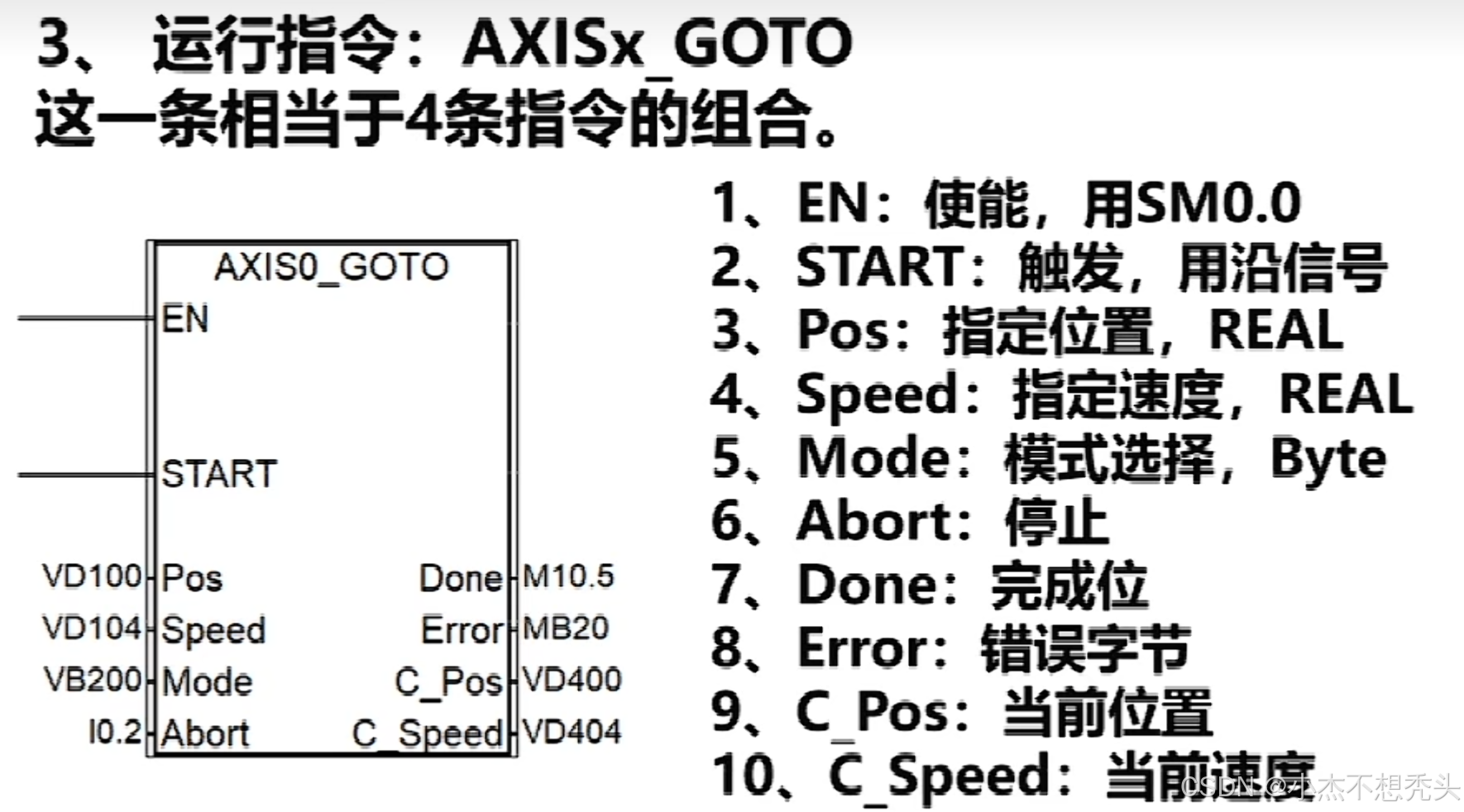
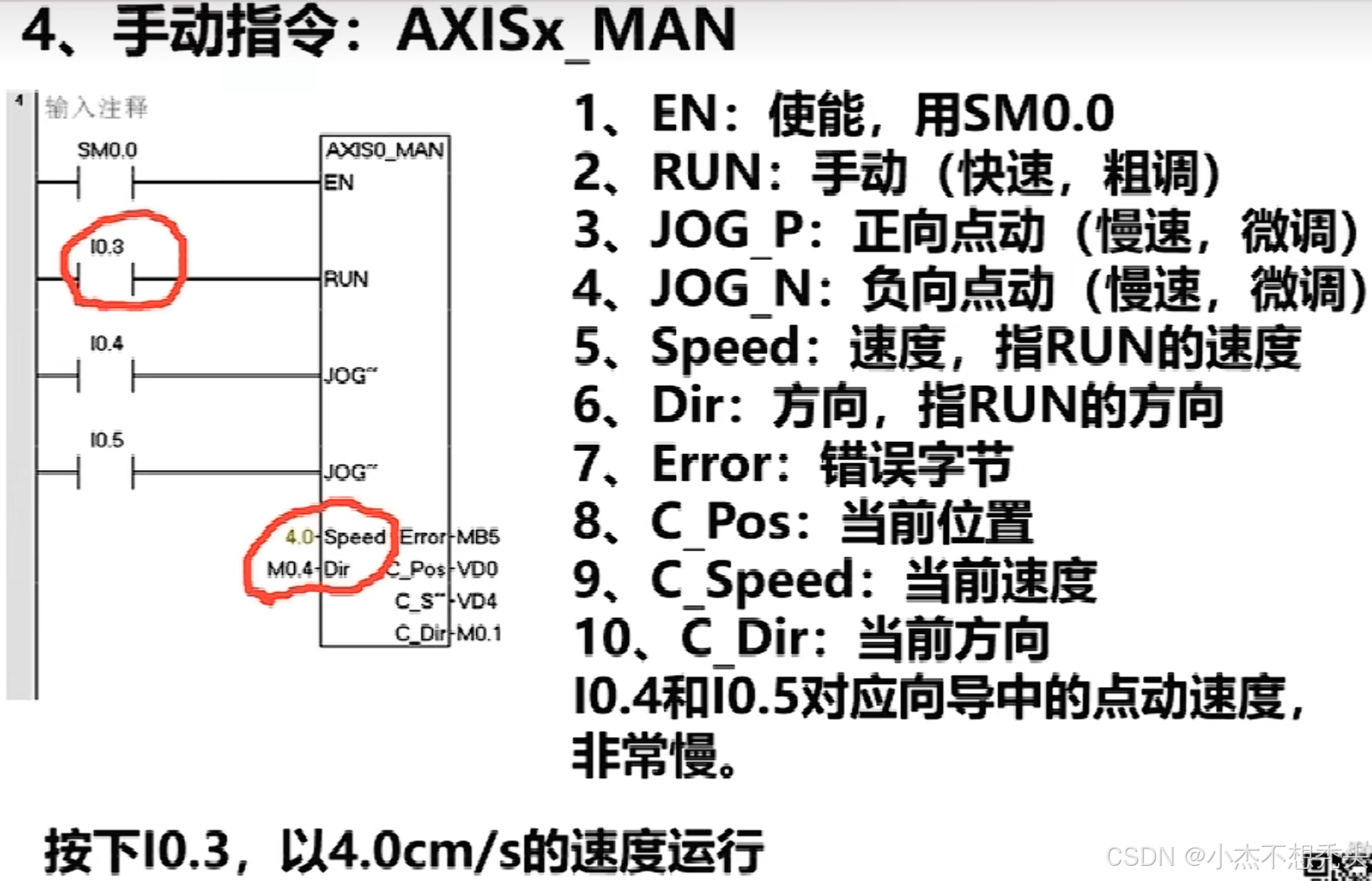
指令讲解
E.1
绝对定位、相对定位、原点、
硬件:PLC、步进驱动、步进电机、丝杆、限位开关。

zp:步进用不到。
STP停止。

沿(edge)是只有一次,level是多次,都可以。
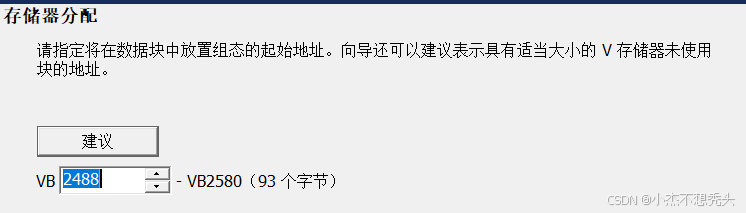
一定要点一下建议,分配地址。
遇到弹框错误时,编译一下。
先把PLC置于stop,在工具=>运动控制面板,中测试一下接线是否正确,并进行逐步调试测试。
E.2: 指令讲解
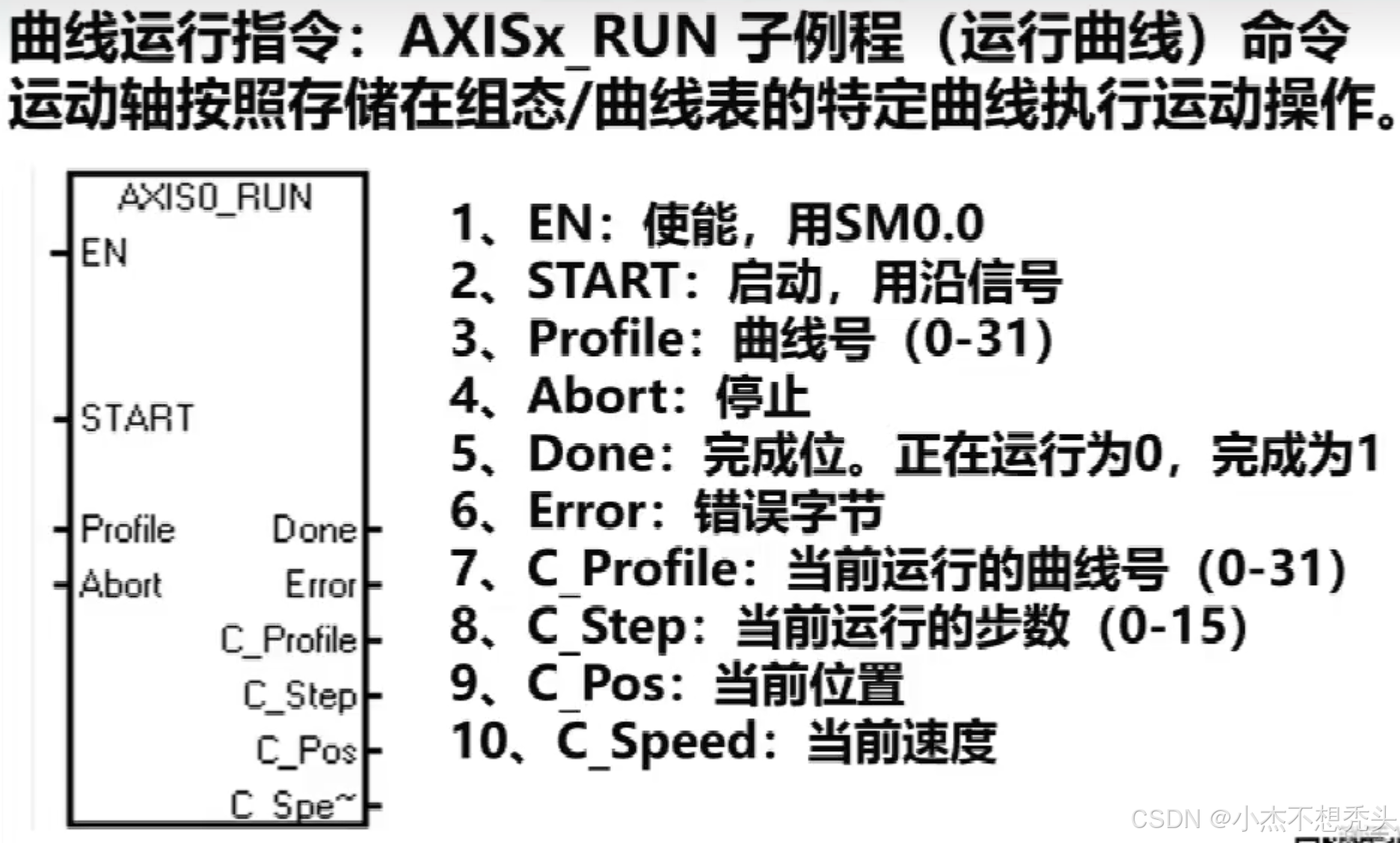
每条运动曲线中所有步的运动方向必须相同。即一个曲线只能一个方向运动。
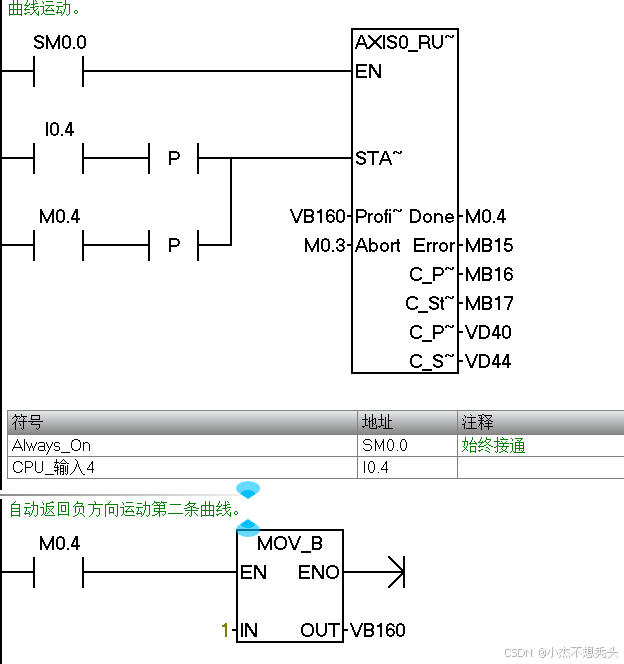
一般用完成位DONE的常开来链接,完成后的所要做的其他操作。
高速计数器向导
官网例子表格
A. 概念。
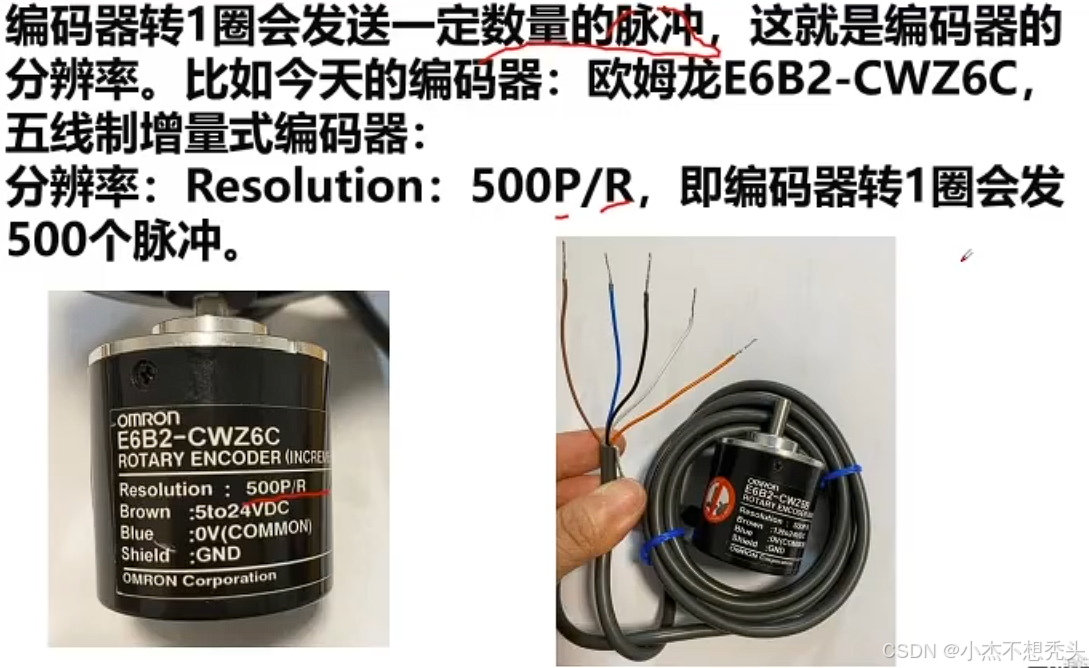
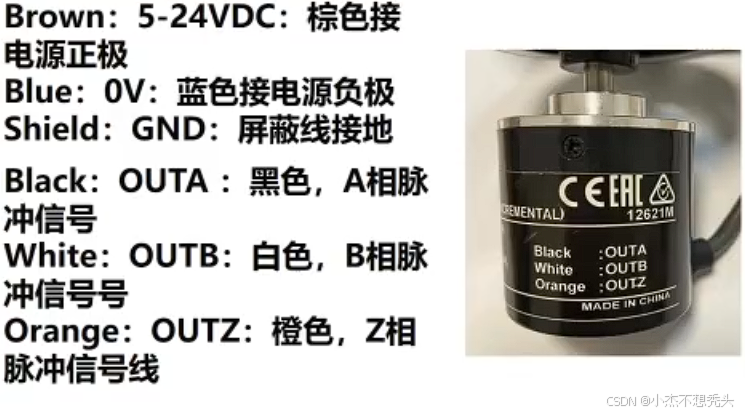
编码器是一种将旋转位移或直线位移转换成电信号的装置。它通过测量旋转角度、位置或速度等物理量,并将其转换为数字脉冲或模拟信号输出。将角位移转换为数字脉冲信号的传感器。
编码器主要分为增量式编码器和绝对式编码器。增量式编码器在转动时输出脉冲,通过计算脉冲数量来确定位置变化和速度;绝对式编码器则在每个位置都有唯一的编码输出,能够直接读取当前的绝对位置。
编码器广泛应用于工业自动化、机器人、数控机床、电机控制等领域,用于精确测量和控制运动的位置、速度和方向。
200KHZ。接输入点,可以理解为传感器。调PLC系统块,编码器测速、测位置。
编码器转一圈会发生一定数量脉冲,这是编码器分辨率,铭牌查看。
200smart支持6个高速计数器,可以设置8种模式。HSC0到HSC5

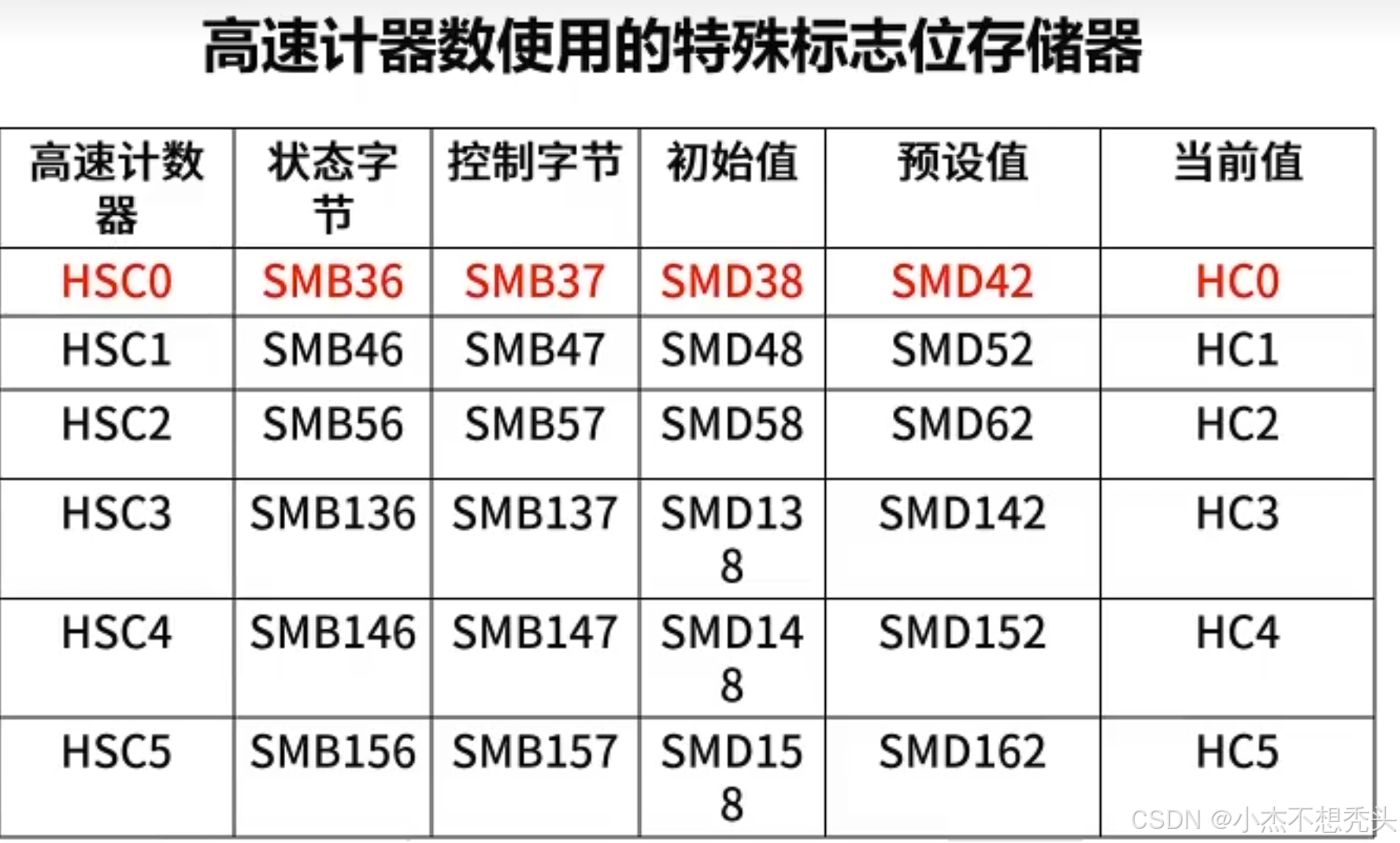

SM37.0,常用0,用来复位,比如按下I0.4(接常开)时为高电位,复位。如果为1(外接常闭),为低电位复位。
一定要改系统块I0.0为0.2微秒,0和9号计数模式用的最多。
版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/bcyy/27095.html